



1. Introduction
Nonlinear evolution equations (NLEEs) have been extensively utilized to describe complex nonlinear physical phenomena in various fields of mathematical physics such as plasma physics, oceanography, ion acoustics, atmospheric waves, condensed-matter physics, fluid dynamics, mathematical materials science, mathematical biology, and so on. Several researchers and mathematicians have paid much attention to obtaining exact rational solutions and closed-form solutions of numerous nonlinear models of NLEE. In the process of doing so, various powerful and efficient analytical mathematical methods have been developed for finding exact analytical solutions, for example, the Bäcklund transformation method [1], the Darboux transformations method [2], the inverse-scattering method [3], the Hirota bilinear method [4], the auxiliary equation method [5], the exp-function method [6], the Lie symmetry method [7–11], the modified F-expansion method [12], modified simple equation methods [13], the $\left(\tfrac{G^{\prime} }{G}\right)$-expansion method [14, 15], the generalized exponential rational function method [16, 17], and so on. Closed-form solutions of NLEEs play a significant role in our understanding of the dynamical structures and characteristic properties of various nonlinear models. Closed-form solutions to NLEEs play a key role in nonlinear physical science, as they can give us more physical information and understanding of the physical aspects of a problem. The nonlinear wave phenomena of dissipation, dispersion, reaction, diffusion, and convection are essential parts of the corresponding nonlinear wave equations. It is well known that nonlinear wave–wave interactions redistribute wave energy over the spectrum, on account of an exchange of energy resulting from resonant sets of wave components. Two processes are important due to their inclusion of nonlinear wave–wave interactions in wave models: four-wave interactions in deep and intermediate waters (known as quadruplets) and three-wave interactions in shallow water (triads), both of which have been described by Neill and Hashemi [18]. In the fields of nonlinear sciences and soliton theory, see, for example, [19–22], which include further relevant nonlinear wave–wave interaction, breather wave, and super regular breather wave papers.
Solitary wave solutions and multiple solitons of different types obtained from the generated solutions are exhibited by assigning appropriate values to the unknown free constants and variables. Solitons/solitary waves are particular types of traveling wave that are not destroyed when they strike other similar types of solitary wave [23–31]. Many different types of exact rational solution for the forms of solitons have attained much attention from researchers/mathematicians interested in the dynamics of solitons, the dynamical structures of multiple solitons, interaction solutions, the properties of solitons, and so on. In this paper, we aim to obtain the exact soliton solutions of the (4+1)-dimensional Fokas equation and (2+1)-dimensional breaking soliton equation via the generalized exponential rational function method. First, we consider a (4+1)-D Fokas equation [32–34] given by1 ) through extended Lax pairs of integrable Kadomtsev-Petviashvili (KP) and Davey-Stewartson (DS) equations [35]. The Fokas equation can be used to model internal waves and surfaces in rivers with disparate physical conditions and elastic and inelastic interactions. In nonlinear solitary wave theory, KP and DS equations can be used to describe surface waves and internal waves in straits or channels of varying depth and width, respectively. The importance of the Fokas equation arises from the physical applications of the KP and DS equations. Thus, the Fokas equation can be adapted to depict a number of phenomena in ocean engineering, fluid mechanics, optical fiber communications, and many others. In particular, this Fokas equation (1 ) is used to represent internal and surface waves in canals.
$\begin{eqnarray}4{u}_{{tx}}+12{u}_{x}{u}_{y}-{u}_{{xxxy}}+{u}_{{xyyy}}-6{u}_{{zw}}+12{{uu}}_{{xy}}=0,\end{eqnarray}$
where u is a wave amplitude function of the variables x, y, z, w and the temporal variable t. Fokas first introduced the higher-dimensional nonlinear wave equation (Another nonlinear evolution equation considered in this work is the (2+1)-D breaking soliton (BS) equation, given as follows:2 ) can be used to describe the interaction of disseminating Riemann waves. The (2+1)-D BS equation has been investigated using the Hirota direct method and a variety of other methods [38–42]. Geng et al [43] recently obtained the Abel-Jacobi coordinates and the scattering coordinates.
$\begin{eqnarray}{u}_{{xxxy}}-2{u}_{y}{u}_{{xx}}-4{u}_{x}{u}_{{xy}}+{u}_{{xt}}=0\end{eqnarray}$
which was introduced by Calogero and Degasperis [36, 37] and is used to describe the interaction of a Riemann wave propagating along the y-axis with a long wave along the x-axis. This equation (Localized solitary waves, multiple solitons, breather types, lump types, rough waves, and the interaction solutions of the (4+1)-D Fokas equation have been studied in [44–50]. In addition, the dynamical structures of solitons, lump types, rough waves, solitary waves, kink waves, and interaction solutions of the (2+1)-D BS equation have been investigated in [51–53].
In this study, the generalized exponential rational technique is utilized on two different types of NLEE, namely, the (4+1)-D Fokas equation and the (2+1)-D BS equation, and many different types of exponential rational function solution are obtained. The solutions constructed are general in formulation, and all the solutions are entirely new and have never been reported previously in existing related papers. The dynamical structures of some of the new solitary wave solutions are demonstrated graphically as well as analytically, which is helpful for researchers/mathematicians aiming to understand the complex physical phenomena of such nonlinear models.
The framework of this paper is as follows: the key stages of the proposed analytical GERF method are discussed in section 2 . We obtain various families of exact soliton solution for equations (1 ) and (2 ), and the dynamical structures of the obtained soliton solutions are demonstrated in the shape of multiple solitons, breather types, and elastic interactions between solitons with kink waves via 3D graphics using the mathematical software Wolfram Mathematica in section 3 . In section 4 , the physical interpretations of the obtained results are addressed. Finally, conclusions regarding the results obtained are given in section 5 .
2. An overview of the GERF method
We illustrate the key steps of the GERF method as follows:
| • | Let us consider the standard nonlinear partial differential equations (PDE), as follows: $\begin{eqnarray}P\left(u,{u}_{x},{u}_{y},{u}_{t},{u}_{w},{u}_{z},{u}_{{xx}},{u}_{{xt}},{u}_{{wz}}...\right)=0.\end{eqnarray}$ Employing the traveling wave transformation $u(x,y,t,w,z)={ \mathcal G }(\xi ),$ where ξ = α x + β y + μt + ρ w + η z + λ, the standard NPDEs are then converted into the following ordinary differential equation (ODE) $\begin{eqnarray}P\left({ \mathcal G },{ \mathcal G }^{\prime} ,{ \mathcal G }^{\prime\prime} ,\ldots \right)=0.\end{eqnarray}$ |
| • | Let us assume that the solution of ( $\begin{eqnarray}{ \mathcal G }{(\xi )={H}_{0}+\sum _{i=1}^{N}{H}_{i}{ \mathcal F }(\xi )}^{i}+\sum _{i=1}^{N}{L}_{i}{ \mathcal F }{(\xi )}^{-i},\end{eqnarray}$ where $\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{{\omega }_{1}{{\rm{e}}}^{{\eta }_{1}X}+{\omega }_{2}{{\rm{e}}}^{{\eta }_{2}X}}{{\omega }_{3}{{\rm{e}}}^{{\eta }_{3}X}+{\omega }_{4}{{\rm{e}}}^{{\eta }_{4}X}}.\end{eqnarray}$ The values of the constants ωi, ηi, (1 ≤ i ≤ 4), H0, Hi, and Li (1 ≤ i ≤ N) are constant coefficients which need to be obtained. Utilizing the homogeneous balance principle, we can determine the value of N. |
| • | Substituting ( |
| • | Eventually, solving the system of nonlinear equations and inserting the obtained solutions into ( |
3. Applications of the GERF method
3.1. Applying the GERF method to the (4+1)-dimensional Fokas equation
The prime objective of this work is to obtain the different types of exact soliton solution for a nonlinear Fokas equation and a breaking soliton equation using the GERF method, as mentioned section 2 above.
To simplify nonlinear Fokas equation (1 ), we assume a wave transformation of the following form:7 ) into (1 ), we get an ODE,8 ), gives N + 4 = N + N + 2 which implies N = 2. Thus, from (5 ) we have a trial solution of the following form:
$\begin{eqnarray}\begin{array}{rcl}u(x,y,t,w,z) & = & { \mathcal G }(\xi ),{\rm{with}}\\ \xi & = & \alpha x+\beta y+\mu t+\rho w+\eta z+\lambda ,\end{array}\end{eqnarray}$
where α, β, μ, ρ, η, and λ are arbitrary constants. Using an expression for μ obtained by substituting ( $\begin{eqnarray}\begin{array}{l}\left({\alpha }^{3}\beta -\alpha {\beta }^{3}\right){{ \mathcal G }}^{(4)}-12\alpha \beta {\left({ \mathcal G }^{\prime} \right)}^{2}\\ \ \ \ -\ 2\left(2\alpha \mu -3\eta \rho +6\alpha \beta { \mathcal G }\right){ \mathcal G }^{\prime\prime} =0.\end{array}\end{eqnarray}$
Applying the balancing principle to the terms ${{ \mathcal G }}^{(4)}$ and ${ \mathcal G }{ \mathcal G }^{\prime\prime} $ of equation ( $\begin{eqnarray}{ \mathcal G }(\xi )={H}_{0}+{H}_{1}{ \mathcal F }(\xi )+{H}_{2}{{ \mathcal F }}^{2}(\xi )+\displaystyle \frac{{L}_{1}}{{ \mathcal F }(\xi )}+\displaystyle \frac{{L}_{2}}{{{ \mathcal F }}^{2}(\xi )}.\end{eqnarray}$
Substituting equation (9 ) into equation (8 ) and following the steps of the GERF method, we consider the following cases in order to seek the closed-form solutions of (1 ) via Mathematica.
Family 1: For [ω1, ω2, ω3, ω4] = [1, −1, 1, 1] and [η1, η2, η3, η4] = [1, −1, 1, −1] , equation (6 ) yields10 ) and (9 ), we obtain an expression for ${ \mathcal G }$:
$\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{\sinh (\xi )}{\cosh (\xi )}.\end{eqnarray}$
Using ( $\begin{eqnarray}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & {H}_{0}+{H}_{1}\tanh (\xi )+{H}_{2}{\tanh }^{2}(\xi )\\ & & +\displaystyle \frac{{L}_{1}}{\tanh (\xi )}+\displaystyle \frac{{L}_{2}}{{\tanh }^{2}(\xi )}.\end{array}\end{eqnarray}$
Case 1.1:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=0,{H}_{2}={\alpha }^{2}-{\beta }^{2},\\ {L}_{1} & = & 0,{L}_{2}={\alpha }^{2}-{\beta }^{2},\\ \mu & = & \displaystyle \frac{-4{\alpha }^{3}\beta +4\alpha {\beta }^{3}+3\eta \rho -6\alpha \beta {H}_{0}}{2\alpha }.\end{array}\end{eqnarray*}$
Inserting the values of the constants above into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\left({\alpha }^{2}-{\beta }^{2}\right){\tanh }^{2}(\xi )+\left({\alpha }^{2}-{\beta }^{2}\right){\coth }^{2}(\xi )+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\left({\alpha }^{2}-{\beta }^{2}\right)\\ \ \times \,{\tanh }^{2}(\lambda +\displaystyle \frac{t\left(-4{\alpha }^{3}\beta +4\alpha {\beta }^{3}+3\eta \rho -6\alpha \beta {H}_{0}\right)}{2\alpha }\\ \ \left.+\ \rho w+\alpha x+\beta y+\eta z\right)+{H}_{0}+\left({\alpha }^{2}-{\beta }^{2}\right)\\ \ \times \ {\coth }^{2}(\lambda +\displaystyle \frac{t\left(-4{\alpha }^{3}\beta +4\alpha {\beta }^{3}+3\eta \rho -6\alpha \beta {H}_{0}\right)}{2\alpha }\\ \ \left.+\ \rho w+\alpha x+\beta y+\eta z\right).\end{array}\end{eqnarray}$
Case 1.2:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=0,{H}_{2}={\alpha }^{2},\\ {L}_{1} & \ne & 0,{L}_{2}=\displaystyle \frac{{\alpha }^{2}}{6},\beta =0,\mu =\displaystyle \frac{3\eta \rho }{2\alpha }.\end{array}\end{eqnarray*}$
Inserting the values of the constants above into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & {\alpha }^{2}{\tanh }^{2}(\xi )+\displaystyle \frac{1}{6}{\alpha }^{2}{\coth }^{2}(\xi )\\ & & +{L}_{1}\coth (\xi )+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)={L}_{1}\coth \left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }\right.\\ \ \left.+\ \rho w+\alpha x+\eta z\right)+{H}_{0}\\ \ +\ {\alpha }^{2}{\tanh }^{2}\left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }+\rho w+\alpha x+\eta z\right)\\ \ +\ \displaystyle \frac{1}{6}{\alpha }^{2}{\coth }^{2}\left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }+\rho w+\alpha x+\eta z\right).\end{array}\end{eqnarray}$
Case 1.3:11 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & = & \displaystyle \frac{-2{\alpha }^{2}\beta +2{\beta }^{3}-\mu }{3\beta },\,\,{H}_{1}=0,\,\,{H}_{2}={\alpha }^{2}-{\beta }^{2},\\ {L}_{1} & = & 0,\,{L}_{2}={\alpha }^{2}-{\beta }^{2},\,\eta =0.\end{array}\end{eqnarray*}$
Inserting the values of the constants above into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{-2{\alpha }^{2}\beta +2{\beta }^{3}-\mu }{3\beta }\\ & & +\left({\alpha }^{2}-{\beta }^{2}\right){\tanh }^{2}(\xi )+\left({\alpha }^{2}-{\beta }^{2}\right){\coth }^{2}(\xi ).\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\displaystyle \frac{-2{\alpha }^{2}\beta +2{\beta }^{3}-\mu }{3\beta }\\ \ +\ \left({\alpha }^{2}-{\beta }^{2}\right){\tanh }^{2}(\lambda +\mu t+\rho w+\alpha x+\beta y)\\ \ +\ \left({\alpha }^{2}-{\beta }^{2}\right){\coth }^{2}(\lambda +\mu t+\rho w+\alpha x+\beta y).\end{array}\end{eqnarray}$
Family 2: For [ω1, ω2, ω3, ω4] = [5 − i, 5 + i, 1, 1] and [η1, η2, η3, η4] = [−i, i, −i, i], equation (6 ) converts into the following form:15 ) into equation (9 ), we get an expression for ${ \mathcal G }(\xi )$ in the following form:
$\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{5\cos (\xi )-\sin (\xi )}{\cos (\xi )}.\end{eqnarray}$
Inserting equation ( $\begin{eqnarray}\begin{array}{l}{ \mathcal G }(\xi )={H}_{0}+{H}_{1}\left(5-\tan (\xi )\right)\\ +\ {H}_{2}{\left(5-\tan (\xi )\right)}^{2}+\displaystyle \frac{{L}_{1}}{\left(5-\tan (\xi )\right)}+\displaystyle \frac{{L}_{2}}{{\left(5-\tan (\xi )\right)}^{2}}.\end{array}\end{eqnarray}$
Case 2.1:16 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=0,{H}_{2}=0,\\ {L}_{1} & = & 260\left({\beta }^{2}-{\alpha }^{2}\right),{L}_{2}=-676\left({\beta }^{2}-{\alpha }^{2}\right),\\ \mu & = & \displaystyle \frac{154{\alpha }^{3}\beta -154\alpha {\beta }^{3}+3\eta \rho -6\alpha \beta {H}_{0}}{2\alpha }.\end{array}\end{eqnarray*}$
Inserting the values of the constants above into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\displaystyle \frac{260\left({\beta }^{2}-{\alpha }^{2}\right)}{5-\tan (\xi )}-\displaystyle \frac{676\left({\beta }^{2}-{\alpha }^{2}\right)}{{\left(5-\tan (\xi )\right)}^{2}}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\displaystyle \frac{260\left({\beta }^{2}-{\alpha }^{2}\right)}{5-\tan \left(\lambda +\tfrac{t\left(154{\alpha }^{3}\beta -154\alpha {\beta }^{3}+3\eta \rho -6\alpha \beta {H}_{0}\right)}{2\alpha }+\rho w+\alpha x+\beta y+\eta z\right)}+{H}_{0}\\ -\ \displaystyle \frac{676\left({\beta }^{2}-{\alpha }^{2}\right)}{\left(5-\tan \left(\lambda +\tfrac{t\left(154{\alpha }^{3}\beta -154\alpha {\beta }^{3}+3\eta \rho -6\alpha \beta {H}_{0}\right)}{2\alpha }+\rho w+\alpha x+\beta y+\eta z\right)\right){}^{2}}.\end{array}\end{eqnarray}$
Case 2.2:16 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=10\left({\beta }^{2}-{\alpha }^{2}\right),\\ {H}_{2} & = & {\alpha }^{2}-{\beta }^{2},{L}_{1}=0,{L}_{2}=0,\\ \eta & = & \displaystyle \frac{-154{\alpha }^{3}\beta +154\alpha {\beta }^{3}+2\alpha \mu +6\alpha \beta {H}_{0}}{3\rho }.\end{array}\end{eqnarray*}$
Inserting the values of the constants above into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \left({\alpha }^{2}-{\beta }^{2}\right){\left(5-\tan (\xi )\right)}^{2}\\ & & +10\left({\beta }^{2}-{\alpha }^{2}\right)\left(5-\tan (\xi )\right)+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ \ =\ \left({\alpha }^{2}-{\beta }^{2}\right)\\ \times \,\left(5-\tan \left(\lambda +\displaystyle \frac{z\left(-154{\alpha }^{3}\beta +154\alpha {\beta }^{3}+2\alpha \mu +6\alpha \beta {H}_{0}\right)}{3\rho }\right.\right.\\ {\left.\left.+\,\mu t+\rho w+\alpha x+\beta y\right)\right)}^{2}+10\left({\beta }^{2}-{\alpha }^{2}\right)\\ \times \,\left(5-\tan \left(\lambda +\displaystyle \frac{z\left(-154{\alpha }^{3}\beta +154\alpha {\beta }^{3}+2\alpha \mu +6\alpha \beta {H}_{0}\right)}{3\rho }\right.\right.\\ \ \left.\left.+\ \mu t+\rho w+\alpha x+\beta y\right)\right)+{H}_{0}.\end{array}\end{eqnarray}$
Case 2.3:16 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=10{\beta }^{2},{H}_{2}=-{\beta }^{2},\\ {L}_{1} & \ne & 0,{L}_{2}\ne 0,\alpha =0,\rho =0.\end{array}\end{eqnarray*}$
Inserting the values of the constants above into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & -{\beta }^{2}{\left(5-\tan (\xi )\right)}^{2}+10{\beta }^{2}\left(5-\tan (\xi )\right)\\ & & +\displaystyle \frac{{L}_{1}}{5-\tan (\xi )}+\displaystyle \frac{{L}_{2}}{{\left(5-\tan (\xi )\right)}^{2}}+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ =\ {H}_{0}-{\beta }^{2}{\left(5-\tan \left(\lambda +\mu t+\beta y+\eta z\right)\right)}^{2}\\ \ +\ 10{\beta }^{2}\left(5-\tan \left(\lambda +\mu t+\beta y+\eta z\right)\right)\\ \ +\ \displaystyle \frac{{L}_{1}}{5-\tan \left(\lambda +\mu t+\beta y+\eta z\right)}\\ \ +\ \displaystyle \frac{{L}_{2}}{{\left(5-\tan \left(\lambda +\mu t+\beta y+\eta z\right)\right)}^{2}}.\end{array}\end{eqnarray}$
Family 3: For [ω1, ω2, ω3, ω4] = [2, −1, 1, −1] and [η1, η2, η3, η4] = [−1, 0, −1, 0], equation (6 ) gives:20 ) and (9 ), we have:
$\begin{eqnarray}F(\xi )=\displaystyle \frac{2-\exp (\xi )}{1-\exp (\xi )}.\end{eqnarray}$
In view of equations ( $\begin{eqnarray}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{{L}_{2}{\left(1-{{\rm{e}}}^{\xi }\right)}^{2}}{{\left(2-{{\rm{e}}}^{\xi }\right)}^{2}}+\displaystyle \frac{{L}_{1}\left(1-{{\rm{e}}}^{\xi }\right)}{2-{{\rm{e}}}^{\xi }}\\ & & +\displaystyle \frac{{H}_{2}{\left(2-{{\rm{e}}}^{\xi }\right)}^{2}}{{\left(1-{{\rm{e}}}^{\xi }\right)}^{2}}+\displaystyle \frac{{H}_{1}\left(2-{{\rm{e}}}^{\xi }\right)}{1-{{\rm{e}}}^{\xi }}+{H}_{0}.\end{array}\end{eqnarray}$
Case 3.1:21 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=0,{H}_{2}=0,\\ {L}_{1} & = & 6\left({\beta }^{2}-{\alpha }^{2}\right),{L}_{2}=-4\left({\beta }^{2}-{\alpha }^{2}\right),\\ \rho & = & -\displaystyle \frac{\alpha \left(25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu -12\beta {H}_{0}\right)}{6\eta }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & -\displaystyle \frac{4{\left(1-{{\rm{e}}}^{\xi }\right)}^{2}\left({\beta }^{2}-{\alpha }^{2}\right)}{{\left(2-{{\rm{e}}}^{\xi }\right)}^{2}}\\ & & +\displaystyle \frac{6\left(1-{{\rm{e}}}^{\xi }\right)\left({\beta }^{2}-{\alpha }^{2}\right)}{2-{{\rm{e}}}^{\xi }}+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ =\,-\displaystyle \frac{4\left({\beta }^{2}-{\alpha }^{2}\right)\left(1-\exp \left(\lambda -\tfrac{\alpha w\left(25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu -12\beta {H}_{0}\right)}{6\eta }+\mu t+\alpha x+\beta y+\eta z\right)\right){}^{2}}{\left(2-\exp \left(\lambda -\tfrac{\alpha w\left(25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu -12\beta {H}_{0}\right)}{6\eta }+\mu t+\alpha x+\beta y+\eta z\right)\right){}^{2}}+{H}_{0}\\ \ +\ \displaystyle \frac{6\left({\beta }^{2}-{\alpha }^{2}\right)\left(1-\exp \left(\lambda -\tfrac{\alpha w\left(25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu -12\beta {H}_{0}\right)}{6\eta }+\mu t+\alpha x+\beta y+\eta z\right)\right)}{2-\exp \left(\lambda -\tfrac{\alpha w\left(25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu -12\beta {H}_{0}\right)}{6\eta }+\mu t+\alpha x+\beta y+\eta z\right)}.\end{array}\end{eqnarray}$
Case 3.2:21 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & = & \displaystyle \frac{25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu }{12\beta },\,{H}_{1}=3\left({\beta }^{2}-{\alpha }^{2}\right),\\ {H}_{2} & = & {\alpha }^{2}-{\beta }^{2},\,{L}_{1}=0,\,{L}_{2}=0,\,\eta =0.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu }{12\beta }\\ & & +\displaystyle \frac{{\left(2-{{\rm{e}}}^{\xi }\right)}^{2}\left({\alpha }^{2}-{\beta }^{2}\right)}{{\left(1-{{\rm{e}}}^{\xi }\right)}^{2}}+\displaystyle \frac{3\left(2-{{\rm{e}}}^{\xi }\right)\left({\beta }^{2}-{\alpha }^{2}\right)}{1-{{\rm{e}}}^{\xi }}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{rcl}u(x,y,t,w,z) & = & \displaystyle \frac{25{\alpha }^{2}\beta -25{\beta }^{3}-4\mu }{12\beta }\\ & & +\displaystyle \frac{\left({\alpha }^{2}-{\beta }^{2}\right){\left(2-{{\rm{e}}}^{\lambda +\mu t+\rho w+\alpha x+\beta y}\right)}^{2}}{{\left(1-{{\rm{e}}}^{\lambda +\mu t+\rho w+\alpha x+\beta y}\right)}^{2}}\\ & & +\displaystyle \frac{3\left({\beta }^{2}-{\alpha }^{2}\right)\left(2-{{\rm{e}}}^{\lambda +\mu t+\rho w+\alpha x+\beta y}\right)}{1-{{\rm{e}}}^{\lambda +\mu t+\rho w+\alpha x+\beta y}}.\end{array}\end{eqnarray}$
Case 3.3:21 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,\,{H}_{1}\ne 0,\,{H}_{2}=\displaystyle \frac{1}{30}\left({L}_{1}-7{H}_{1}\right),\\ {L}_{1} & \ne & 0,\,{L}_{2}=\displaystyle \frac{1}{15}\left(4{H}_{1}-7{L}_{1}\right),\,\beta =0,\,\rho =\displaystyle \frac{2\alpha \mu }{3\eta }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{{\left(1-{{\rm{e}}}^{\xi }\right)}^{2}\left(4{H}_{1}-7{L}_{1}\right)}{15{\left(2-{{\rm{e}}}^{\xi }\right)}^{2}}+\displaystyle \frac{{\left(2-{{\rm{e}}}^{\xi }\right)}^{2}\left({L}_{1}-7{H}_{1}\right)}{30{\left(1-{{\rm{e}}}^{\xi }\right)}^{2}}\\ & & +\displaystyle \frac{{L}_{1}\left(1-{{\rm{e}}}^{\xi }\right)}{2-{{\rm{e}}}^{\xi }}+\displaystyle \frac{{H}_{1}\left(2-{{\rm{e}}}^{\xi }\right)}{1-{{\rm{e}}}^{\xi }}+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\displaystyle \frac{\left(4{H}_{1}-7{L}_{1}\right){\left(1-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}\right)}^{2}}{15{\left(2-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}\right)}^{2}}\\ \ \ +\ \displaystyle \frac{\left({L}_{1}-7{H}_{1}\right){\left(2-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}\right)}^{2}}{30{\left(1-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}\right)}^{2}}\\ \ \ +\ \displaystyle \frac{{L}_{1}\left(1-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}\right)}{2-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}}\\ \ \ +\ \displaystyle \frac{{H}_{1}\left(2-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}\right)}{1-{{\rm{e}}}^{\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z}}+{H}_{0}.\end{array}\end{eqnarray}$
Family 4: For [ω1, ω2, ω3, ω4] = [1, 1, 1, −1] and [η1, η2, η3, η4] = [1, 1, 1, −1], equation (6 ) gives:25 ) and (9 ), we get:
$\begin{eqnarray}{ \mathcal F }(\xi )=\coth (\xi )+1.\end{eqnarray}$
Making use of equations ( $\begin{eqnarray}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{{L}_{2}}{{\left(\coth (\xi )+1\right)}^{2}}+\displaystyle \frac{{L}_{1}}{\coth (\xi )+1}\\ & & +{H}_{2}{\left(\coth (\xi )+1\right)}^{2}+{H}_{1}\left(\coth (\xi )+1\right)+{H}_{0}.\end{array}\end{eqnarray}$
Case 4.1:26 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=2\left({\beta }^{2}-{\alpha }^{2}\right),{H}_{2}={\alpha }^{2}-{\beta }^{2},\\ {L}_{1} & = & 0,{L}_{2}=0,\eta =\displaystyle \frac{2\alpha \left(-{\alpha }^{2}\beta +{\beta }^{3}+\mu +3\beta {H}_{0}\right)}{3\rho }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \left({\alpha }^{2}-{\beta }^{2}\right){\left(\coth (\xi )+1\right)}^{2}\\ & & +2\left({\beta }^{2}-{\alpha }^{2}\right)\left(\coth (\xi )+1\right)+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\left({\alpha }^{2}-{\beta }^{2}\right)\\ \ \times \ \left(\coth \left(\lambda +\displaystyle \frac{2\alpha z\left(-{\alpha }^{2}\beta +{\beta }^{3}+\mu +3\beta {H}_{0}\right)}{3\rho }\right.\right.\\ \ \left.\left.+\ \mu t+\rho w+\alpha x+\beta y\right)+1\right){}^{2}+{H}_{0}\\ \ +\ 2\left({\beta }^{2}-{\alpha }^{2}\right)\left(\coth \left(\lambda +\displaystyle \frac{2\alpha z\left(-{\alpha }^{2}\beta +{\beta }^{3}+\mu +3\beta {H}_{0}\right)}{3\rho }\right.\right.\\ \ \left.\left.+\ \mu t+\rho w+\alpha x+\beta y\right)+1\right).\end{array}\end{eqnarray}$
Case 4.2:26 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=-2{\alpha }^{2},{H}_{2}={\alpha }^{2},\beta =0,\\ {L}_{1} & \ne & 0,{L}_{2}\ne 0,\eta =\displaystyle \frac{2\alpha \mu }{3\rho }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & {\alpha }^{2}{\left(\coth (\xi )+1\right)}^{2}-2{\alpha }^{2}\left(\coth (\xi )+1\right)\\ & & +\displaystyle \frac{{L}_{1}}{\coth (\xi )+1}+\displaystyle \frac{{L}_{2}}{{\left(\coth (\xi )+1\right)}^{2}}+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\displaystyle \frac{{L}_{1}}{\coth \left(\lambda +\mu t+\rho w+\alpha x+\tfrac{2\alpha \mu z}{3\rho }\right)+1}\\ \ +\ \displaystyle \frac{{L}_{2}}{{\left(\coth \left(\lambda +\mu t+\rho w+\alpha x+\tfrac{2\alpha \mu z}{3\rho }\right)+1\right)}^{2}}+{H}_{0}\\ \ +\ {\alpha }^{2}{\left(\coth \left(\lambda +\mu t+\rho w+\alpha x+\displaystyle \frac{2\alpha \mu z}{3\rho }\right)+1\right)}^{2}\\ \ -\ 2{\alpha }^{2}\left(\coth \left(\lambda +\mu t+\rho w+\alpha x+\displaystyle \frac{2\alpha \mu z}{3\rho }\right)+1\right).\end{array}\end{eqnarray}$
Case 4.3:26 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{rcl}{H}_{0} & \ne & 0,{H}_{1}=2{\beta }^{2},{H}_{2}=-{\beta }^{2},\\ {L}_{1} & \ne & 0,{L}_{2}\ne 0,\alpha =0,\rho =0.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & -{\beta }^{2}{\left(\coth (\xi )+1\right)}^{2}+2{\beta }^{2}\left(\coth (\xi )+1\right)\\ & & +\displaystyle \frac{{L}_{1}}{\coth (\xi )+1}+\displaystyle \frac{{L}_{2}}{{\left(\coth (\xi )+1\right)}^{2}}+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\displaystyle \frac{{L}_{1}}{\coth \left(\lambda +\mu t+\beta y+\eta z\right)+1}\\ \ +\ \displaystyle \frac{{L}_{2}}{{\left(\coth \left(\lambda +\mu t+\beta y+\eta z\right)+1\right)}^{2}}+{H}_{0}\\ \ -\ {\beta }^{2}{\left(\coth \left(\lambda +\mu t+\beta y+\eta z\right)+1\right)}^{2}\\ \ +\ 2{\beta }^{2}\left(\coth \left(\lambda +\mu t+\beta y+\eta z\right)+1\right).\end{array}\end{eqnarray}$
Family 5: For [ω1, ω2, ω3, ω4] = [3, −3, 3, 3] and [η1, η2, η3, η4] = [3, −3, 3, −3], equation (6 ) gives:30 ) into equation (9 ), we get:
$\begin{eqnarray}{ \mathcal F }(\xi )=\tanh (3\xi ).\end{eqnarray}$
Inserting equation ( $\begin{eqnarray}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & {L}_{2}{\coth }^{2}(3\xi )+{L}_{1}\coth (3\xi )\\ & & +{H}_{2}{\tanh }^{2}(3\xi )+{H}_{1}\tanh (3\xi )+{H}_{0}.\end{array}\end{eqnarray}$
Case 5.1:31 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}=0,{H}_{2}=9{\alpha }^{2},\\ {L}_{1}\ne ,\,{L}_{2}=\displaystyle \frac{3{\alpha }^{2}}{2},\beta =0,\alpha =\displaystyle \frac{3\eta \rho }{2\mu }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{81{\eta }^{2}{\rho }^{2}{\tanh }^{2}(3\xi )}{4{\mu }^{2}}+\displaystyle \frac{27{\eta }^{2}{\rho }^{2}{\coth }^{2}(3\xi )}{8{\mu }^{2}}\\ & & +{L}_{1}\coth (3\xi )+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ =\ {L}_{1}\coth \left(3\left(\lambda +\mu t+\rho w+\displaystyle \frac{3\eta \rho x}{2\mu }+\eta z\right)\right)\\ \ +\ \displaystyle \frac{81{\eta }^{2}{\rho }^{2}{\tanh }^{2}\left(3\left(\lambda +\mu t+\rho w+\tfrac{3\eta \rho x}{2\mu }+\eta z\right)\right)}{4{\mu }^{2}}\\ \ +\ \displaystyle \frac{27{\eta }^{2}{\rho }^{2}{\coth }^{2}\left(3\left(\lambda +\mu t+\rho w+\tfrac{3\eta \rho x}{2\mu }+\eta z\right)\right)}{8{\mu }^{2}}+{H}_{0}.\end{array}\end{eqnarray}$
Case 5.2:31 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}\ne 0,{H}_{2}\ne ,\beta =0,\\ {L}_{1}\ne 0,{L}_{2}=\displaystyle \frac{3{\alpha }^{2}}{2},\alpha =\displaystyle \frac{3\eta \rho }{2\mu }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{27{\eta }^{2}{\rho }^{2}{\coth }^{2}(3\xi )}{8{\mu }^{2}}+{L}_{1}\coth (3\xi )\\ & & +{H}_{2}{\tanh }^{2}(3\xi )+{H}_{1}\tanh (3\xi )+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ =\,\displaystyle \frac{27{\eta }^{2}{\rho }^{2}{\coth }^{2}\left(3\left(\lambda +\mu t+\rho w+\tfrac{3\eta \rho x}{2\mu }+\eta z\right)\right)}{8{\mu }^{2}}\\ \ +\ {L}_{1}\coth \left(3\left(\lambda +\mu t+\rho w+\displaystyle \frac{3\eta \rho x}{2\mu }+\eta z\right)\right)\\ \ +\ {H}_{1}\tanh \left(3\left(\lambda +\mu t+\rho w+\displaystyle \frac{3\eta \rho x}{2\mu }+\eta z\right)\right)\\ \ +\ {H}_{2}{\tanh }^{2}\left(3\left(\lambda +\mu t+\rho w+\displaystyle \frac{3\eta \rho x}{2\mu }+\eta z\right)\right)+{H}_{0}.\end{array}\end{eqnarray}$
Case 5.3:31 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}\ne 0,{H}_{2}=9{\alpha }^{2},\\ {L}_{1}\ne 0,{L}_{2}=9{\alpha }^{2},\beta =0,\mu =\displaystyle \frac{3\eta \rho }{2\alpha }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & 9{\alpha }^{2}{\tanh }^{2}(3\xi )+9{\alpha }^{2}{\coth }^{2}(3\xi )\\ & & +{L}_{1}\coth (3\xi )+{H}_{1}\tanh (3\xi )+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ =\ {L}_{1}\coth \left(3\left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }+\rho w+\alpha x+\eta z\right)\right)\\ \ +\ {H}_{1}\tanh \left(3\left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }+\rho w+\alpha x+\eta z\right)\right)+{H}_{0}\\ \ +\ 9{\alpha }^{2}{\tanh }^{2}\left(3\left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }+\rho w+\alpha x+\eta z\right)\right)\\ \ +\ 9{\alpha }^{2}{\coth }^{2}\left(3\left(\lambda +\displaystyle \frac{3\eta \rho t}{2\alpha }+\rho w+\alpha x+\eta z\right)\right).\end{array}\end{eqnarray}$
Family 6: For [ω1, ω2, ω3, ω4] = [2, 0, 2, 2] and [η1, η2, η3, η4] = [2, −2, 2, 0], equation (6 ) has the form:35 ) into equation (9 ), we have:
$\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{1}{2}\left(1+\tanh \left(\xi \right)\right).\end{eqnarray}$
Substituting equation ( $\begin{eqnarray}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{4{L}_{2}}{{\left(1+\tanh \left(\xi \right)\right)}^{2}}+\displaystyle \frac{2{L}_{1}}{1+\tanh (\xi )}\\ & & +\displaystyle \frac{1}{4}{H}_{2}{\left(1+\tanh \left(\xi \right)\right)}^{2}+\displaystyle \frac{1}{2}{H}_{1}\left(1+\tanh \left(\xi \right)\right)+{H}_{0}.\end{array}\end{eqnarray}$
Case 6.1:36 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}=4\left({\beta }^{2}-{\alpha }^{2}\right),{H}_{2}=-4\left({\beta }^{2}-{\alpha }^{2}\right),\\ {L}_{1}=0,{L}_{2}=0,\beta =0,\\ \rho =-\displaystyle \frac{2\alpha \left({\alpha }^{2}\beta -{\beta }^{3}-\mu -3\beta {H}_{0}\right)}{3\eta }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & -\left({\beta }^{2}-{\alpha }^{2}\right){\left(1+\tanh \left(\xi \right)\right)}^{2}\\ & & +2\left({\beta }^{2}-{\alpha }^{2}\right)\left(1+\tanh \left(\xi \right)\right)+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=-\left({\beta }^{2}-{\alpha }^{2}\right)\\ \ \times \ \left(\tanh \left(\lambda -\displaystyle \frac{2\alpha w\left({\alpha }^{2}\beta -{\beta }^{3}-\mu -3\beta {H}_{0}\right)}{3\eta }\right.\right.\\ \ \left.\left.+\ \mu t+\alpha x+\beta y+\eta z\right)+1\right){}^{2}+{H}_{0}\\ \ +\ 2\left({\beta }^{2}-{\alpha }^{2}\right)\left(\tanh \left(\lambda -\displaystyle \frac{2\alpha w\left({\alpha }^{2}\beta -{\beta }^{3}-\mu -3\beta {H}_{0}\right)}{3\eta }\right.\right.\\ \ \left.\left.+\ \mu t+\alpha x+\beta y+\eta z\right)+1\right).\end{array}\end{eqnarray}$
Case 6.2:36 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}=-4{\alpha }^{2},{H}_{2}=4{\alpha }^{2},\beta =0,\\ {L}_{1}\ne 0,{L}_{2}\ne 0,\eta =\displaystyle \frac{2\alpha \mu }{3\rho }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & {\alpha }^{2}{\left(1+\tanh \left(\xi \right)\right)}^{2}-2{\alpha }^{2}\left(1+\tanh \left(\xi \right)\right)\\ & & +\displaystyle \frac{2{L}_{1}}{1+\tanh (\xi )}+\displaystyle \frac{4{L}_{2}}{{\left(1+\tanh \left(\xi \right)\right)}^{2}}+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)\\ =\ \displaystyle \frac{2{L}_{1}}{\tanh \left(\lambda +\mu t+\rho w+\alpha x+\tfrac{2\alpha \mu z}{3\rho }\right)+1}\\ \ +\ \displaystyle \frac{4{L}_{2}}{{\left(\tanh \left(\lambda +\mu t+\rho w+\alpha x+\tfrac{2\alpha \mu z}{3\rho }\right)+1\right)}^{2}}+{H}_{0}\\ \ +\ {\alpha }^{2}{\left(\tanh \left(\lambda +\mu t+\rho w+\alpha x+\displaystyle \frac{2\alpha \mu z}{3\rho }\right)+1\right)}^{2}\\ \ -\ 2{\alpha }^{2}\left(\tanh \left(\lambda +\mu t+\rho w+\alpha x+\displaystyle \frac{2\alpha \mu z}{3\rho }\right)+1\right).\end{array}\end{eqnarray}$
Case 6.3:36 ), equation (8 ) then provides:1 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}\ne 0,{H}_{2}\ne 0,\\ {L}_{1}\ne 0,{L}_{2}=0,\beta =0,\rho =\displaystyle \frac{2\alpha \mu }{3\eta }.\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}\begin{array}{rcl}{ \mathcal G }(\xi ) & = & \displaystyle \frac{2{L}_{1}}{1+\tanh (\xi )}+\displaystyle \frac{1}{4}{H}_{2}{\left(1+\tanh \left(\xi \right)\right)}^{2}\\ & & +\displaystyle \frac{1}{2}{H}_{1}\left(1+\tanh \left(\xi \right)\right)+{H}_{0}.\end{array}\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}\begin{array}{l}u(x,y,t,w,z)=\displaystyle \frac{2{L}_{1}}{\tanh \left(\lambda +\mu t+\tfrac{2\alpha \mu w}{3\eta }+\alpha x+\eta z\right)+1}\\ \ +\ \displaystyle \frac{1}{4}{H}_{2}{\left(\tanh \left(\lambda +\mu t+\displaystyle \frac{2\alpha \mu w}{3\eta }+\alpha x+\eta z\right)+1\right)}^{2}\\ \ +\ \displaystyle \frac{1}{2}{H}_{1}\left(\tanh \left(\lambda +\mu t+\displaystyle \frac{2\alpha \mu w}{3\eta }+\alpha x+\eta z\right)+1\right)+{H}_{0}.\end{array}\end{eqnarray}$
3.2. Applying the GERF method to the (2+1)-D BS equation
We now consider a (2+1)-dimensional BS equation:40 ), we assume a wave transformation of the following form:41 ) into (40 ), we obtain an ODE of the following form:42 ), we obtain N + 4 = N + 1 + N + 2, which implies that N = 1. Therefore, from equation (5 ), we obtain a trial solution, as follows:43 ) into (42 ) and follow the steps of the GERF method.
$\begin{eqnarray}{u}_{{xxxy}}-2{u}_{y}{u}_{{xx}}-4{u}_{x}{u}_{{xy}}+{u}_{{xt}}=0.\end{eqnarray}$
To simplify equation ( $\begin{eqnarray}u(x,y,t)={ \mathcal G }(\xi ),\ {\rm{with}}\ \xi =\alpha x+\beta y+\mu t+\lambda ,\end{eqnarray}$
where α, β, μand λ are arbitrary constants. Substituting equation ( $\begin{eqnarray}{\alpha }^{3}\beta {{ \mathcal G }}^{(4)}(\xi )+\alpha {G^{\prime\prime} }(\xi )\left(\mu -6\alpha \beta {{ \mathcal G }}^{{\prime} }(\xi )\right)=0.\end{eqnarray}$
By applying the homogeneous balancing principle to the terms ${{ \mathcal G }}^{(4)}$ and ${{ \mathcal G }}^{{\prime} }{{ \mathcal G }}^{{\prime\prime} }$ in equation ( $\begin{eqnarray}{ \mathcal G }(\xi )={H}_{0}+{H}_{1}{ \mathcal F }(\xi )+\displaystyle \frac{{L}_{1}}{{ \mathcal F }(\xi )}.\end{eqnarray}$
We substitute equation (Family 1: For [ω1, ω2, ω3, ω4] = [−5, 7, 1, 1] and [η1, η2, η3, η4] = [1, 0, 1, 0], equation (6 ) has the following form:44 ) into (43 ), we obtain:
$\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{7-5{{\rm{e}}}^{\xi }}{{{\rm{e}}}^{\xi }+1}.\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )=\displaystyle \frac{{L}_{1}\left({{\rm{e}}}^{\xi }+1\right)}{7-5{{\rm{e}}}^{\xi }}+\displaystyle \frac{{H}_{1}\left(7-5{{\rm{e}}}^{\xi }\right)}{{{\rm{e}}}^{\xi }+1}+{H}_{0}.\end{eqnarray}$
Case 1.1:45 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=0,{L}_{1}=\displaystyle \frac{35\alpha }{6},\mu =-{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\displaystyle \frac{35\alpha \left({{\rm{e}}}^{\xi }+1\right)}{6\left(7-5{{\rm{e}}}^{\xi }\right)}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}u(x,y,t)={H}_{0}+\displaystyle \frac{35\alpha \left({{\rm{e}}}^{\lambda +{\alpha }^{2}\beta (-t)+\alpha x+\beta y}+1\right)}{6\left(7-5{{\rm{e}}}^{\lambda +{\alpha }^{2}\beta (-t)+\alpha x+\beta y}\right)}.\end{eqnarray}$
Case 1.2:45 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=\displaystyle \frac{\alpha }{6},{L}_{1}=0,\mu =-{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\displaystyle \frac{\alpha \left(7-5{{\rm{e}}}^{\xi }\right)}{6\left({{\rm{e}}}^{\xi }+1\right)}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of ( $\begin{eqnarray}u(x,y,t)={H}_{0}+\displaystyle \frac{\alpha \left(7-5{{\rm{e}}}^{\lambda +{\alpha }^{2}\beta (-t)+\alpha x+\beta y}\right)}{6\left({{\rm{e}}}^{\lambda +{\alpha }^{2}\beta (-t)+\alpha x+\beta y}+1\right)}.\end{eqnarray}$
Case 1.3:45 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,\,{H}_{1}=0,\,{L}_{1}=\displaystyle \frac{35\alpha }{6},\beta =-\displaystyle \frac{\mu }{{\alpha }^{2}}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\displaystyle \frac{35\alpha \left({{\rm{e}}}^{\xi }+1\right)}{6\left(7-5{{\rm{e}}}^{\xi }\right)}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)=\displaystyle \frac{35\alpha \left({{\rm{e}}}^{\lambda +\mu t+\alpha x-y\tfrac{\mu }{{\alpha }^{2}}}+1\right)}{6\left(7-5{{\rm{e}}}^{\lambda +\mu t+\alpha x-y\tfrac{\mu }{{\alpha }^{2}}}\right)}+{H}_{0}.\end{eqnarray}$
Family 2: For [ω1, ω2, ω3, ω4] = [3 + i, 3 − i, 1, 1] and [η1, η2, η3, η4] = [−i, i, −i, i], equation (6 ) has the following form:49 ) into (43 ), we obtain:
$\begin{eqnarray}{ \mathcal F }(\xi )=\tan (\xi )+3.\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )=\displaystyle \frac{{L}_{1}}{\tan (\xi )+3}+{H}_{1}(\tan (\xi )+3)+{H}_{0}.\end{eqnarray}$
Case 2.1:50 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=0,{L}_{1}=-20\alpha ,\mu =4{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=-\displaystyle \frac{20\alpha }{\tan (\xi )+3}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}-\displaystyle \frac{20\alpha }{\tan \left(\lambda +4{\alpha }^{2}\beta t+\alpha x+\beta y\right)+3}.\end{eqnarray}$
Case 2.2:50 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=2\alpha ,{L}_{1}=0,\mu =4{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=2\alpha (\tan (\xi )+3)+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}+2\alpha \left(\tan \left(\lambda +4{\alpha }^{2}\beta t+\alpha x+\beta y\right)+3\right).\end{eqnarray}$
Case 2.3:50 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,\,{H}_{1}=0,\,{L}_{1}=-20\alpha ,\alpha =\sqrt{\displaystyle \frac{\mu }{4\beta }}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-\displaystyle \frac{10\sqrt{\tfrac{\mu }{\beta }}}{\tan (\xi )+3}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)=-\displaystyle \frac{10\sqrt{\tfrac{\mu }{\beta }}}{\tan \left(\lambda +\mu t+\tfrac{1}{2}x\sqrt{\tfrac{\mu }{\beta }}+\beta y\right)+3}+{H}_{0}.\end{eqnarray}$
Family 3: For [ω1, ω2, ω3, ω4] = [7 − i, −7 − i, −1, 1] and [η1, η2, η3, η4] = [i, −i, i, −i] , equation (6 ) has the form54 ) into (43 ), we obtain:
$\begin{eqnarray}{ \mathcal F }(\xi )=\cot (\xi )-7.\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )=\displaystyle \frac{{L}_{1}}{\cot (\xi )-7}+{H}_{1}(\cot (\xi )-7)+{H}_{0}.\end{eqnarray}$
Case 3.1:55 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=0,{L}_{1}=100\alpha ,\beta =\displaystyle \frac{\mu }{4{\alpha }^{2}}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\displaystyle \frac{100\alpha }{\cot (\xi )-7}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}+\displaystyle \frac{100\alpha }{\cot \left(\lambda +\mu t+\alpha x+\tfrac{\mu y}{4{\alpha }^{2}}\right)-7}.\end{eqnarray}$
Case 3.2:55 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=-2\alpha ,{L}_{1}=0,\alpha =\sqrt{\displaystyle \frac{\mu }{4\beta }}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=-\sqrt{\displaystyle \frac{\mu }{\beta }}(\cot (\xi )-7)+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}-\sqrt{\displaystyle \frac{\mu }{\beta }}\left(\cot \left(\lambda +\mu t+\displaystyle \frac{1}{2}x\sqrt{\displaystyle \frac{\mu }{\beta }}+\beta y\right)-7\right).\end{eqnarray}$
Case 3.3:55 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,\,{H}_{1}=0,\,{L}_{1}=100\alpha ,\alpha =-\sqrt{\displaystyle \frac{\mu }{4\beta }}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-\displaystyle \frac{50\sqrt{\tfrac{\mu }{\beta }}}{\cot (\xi )-7}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)=\displaystyle \frac{50\sqrt{\tfrac{\mu }{\beta }}}{\cot \left(\lambda +\mu t-\tfrac{1}{2}x\sqrt{\tfrac{\mu }{\beta }}+\beta y\right)-7}+{H}_{0}.\end{eqnarray}$
Family 4: For [ω1, ω2, ω3, ω4] = [4, 0, 4, 4] and [η1, η2, η3, η4] = [4, −4, 4, 0], equation (6 ) has the following form:59 ) into (43 ), we have,
$\begin{eqnarray}{ \mathcal F }(\xi )=1-\displaystyle \frac{1}{{{\rm{e}}}^{4\xi }+1}.\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )={L}_{1}{{\rm{e}}}^{-4\xi }\left({{\rm{e}}}^{4\xi }+1\right)+\displaystyle \frac{{{\rm{e}}}^{4\xi }}{{{\rm{e}}}^{4\xi }+1}{H}_{1}+{H}_{0}.\end{eqnarray}$
Case 4.1:60 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=-8\alpha ,{L}_{1}=0,\beta =-\displaystyle \frac{\mu }{16{\alpha }^{2}}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=-\displaystyle \frac{8\alpha {{\rm{e}}}^{4\xi }}{{{\rm{e}}}^{4\xi }+1}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}-\displaystyle \frac{8\alpha {{\rm{e}}}^{4\left(\lambda +\mu t+\alpha x-\tfrac{\mu y}{16{\alpha }^{2}}\right)}}{{{\rm{e}}}^{4\left(\lambda +\mu t+\alpha x-\tfrac{\mu y}{16{\alpha }^{2}}\right)}+1}.\end{eqnarray}$
Case 4.2:60 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}\ne 0,{L}_{1}\ne 0,\alpha =0.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={L}_{1}{{\rm{e}}}^{-4\xi }\left({{\rm{e}}}^{4\xi }+1\right)+\displaystyle \frac{{H}_{1}{{\rm{e}}}^{4\xi }}{{{\rm{e}}}^{4\xi }+1}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}\begin{array}{rcl}u(x,y,t) & = & {L}_{1}{{\rm{e}}}^{-4(\lambda +\mu t+\beta y)}\left({{\rm{e}}}^{4(\lambda +\mu t+\beta y)}+1\right)\\ & & +\displaystyle \frac{{H}_{1}{{\rm{e}}}^{4(\lambda +\mu t+\beta y)}}{{{\rm{e}}}^{4(\lambda +\mu t+\beta y)}+1}+{H}_{0}.\end{array}\end{eqnarray}$
Case 4.3:60 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,\,{H}_{1}=\pm \displaystyle \frac{2{\rm{i}}\sqrt{\mu }}{\sqrt{\beta }},\,{L}_{1}=0,\alpha =\pm \displaystyle \frac{{\rm{i}}\sqrt{\mu }}{4\sqrt{\beta }}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}\pm \displaystyle \frac{2{\rm{i}}\sqrt{\mu }{e}^{4\xi }}{\sqrt{\beta }\left({e}^{4\xi }+1\right)}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}\pm \displaystyle \frac{2{\rm{i}}\sqrt{\mu }{e}^{4\left(\lambda +\mu t\pm \tfrac{i\sqrt{\mu }x}{4\sqrt{\beta }}+\beta y\right)}}{\sqrt{\beta }\left(1+{e}^{4\left(\lambda +\mu t\pm \tfrac{i\sqrt{\mu }x}{4\sqrt{\beta }}+\beta y\right)}\right)}.\end{eqnarray}$
Family 5: For [ω1, ω2, ω3, ω4] = [1 + i, 1 − i, 2, 2] and [η1, η2, η3, η4] = [i, −i, i, −i], equation (6 ) has the following form:64 ) into (43 ), we obtain:
$\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{1}{2}(1-\tan (\xi )).\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )=\displaystyle \frac{1}{2}{H}_{1}(1-\tan (\xi ))+{H}_{0}+\displaystyle \frac{2{L}_{1}}{1-\tan (\xi )}.\end{eqnarray}$
Case 5.1:65 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=0,{L}_{1}=2\alpha ,\lambda =4{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=\displaystyle \frac{4\alpha }{1-\tan (\xi )}+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}+\displaystyle \frac{4\alpha }{1-\tan \left(\kappa +4{\alpha }^{2}\beta t+\alpha x+\beta y\right)}.\end{eqnarray}$
Case 5.2:65 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=-4\alpha ,{L}_{1}=0,\lambda =4{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-2\alpha (1-\tan (\xi )).\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}-2\alpha \left(1-\tan \left(\kappa +4{\alpha }^{2}\beta t+\alpha x+\beta y\right)\right).\end{eqnarray}$
Family 6: For [ω1, ω2, ω3, ω4] = [2i, 2i, i, i] and [η1, η2, η3, η4] = [0, 0, −7, 0], equation (6 ) has the following form:68 ) into (43 ), we obtain:
$\begin{eqnarray}{ \mathcal F }(\xi )=2\left(\tanh \left(\displaystyle \frac{7\xi }{2}\right)+1\right).\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )=2{H}_{1}\left(\tanh \left(\displaystyle \frac{7\xi }{2}\right)+1\right)+{H}_{0}+\displaystyle \frac{{L}_{1}}{2\left(\tanh \left(\tfrac{7\xi }{2}\right)+1\right)}.\end{eqnarray}$
Case 6.1:69 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=-\displaystyle \frac{7\alpha }{2},{L}_{1}=0,\beta =-\displaystyle \frac{\lambda }{49{\alpha }^{2}}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-7\alpha \left(\tanh \left(\displaystyle \frac{7\xi }{2}\right)+1\right).\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}\begin{array}{l}u(x,y,t)={H}_{0}\\ \ -\ 7\alpha \left(\tanh \left(\displaystyle \frac{7}{2}\left(\kappa +\lambda t+\alpha x-\displaystyle \frac{\lambda y}{49{\alpha }^{2}}\right)\right)+1\right).\end{array}\end{eqnarray}$
Case 6.2:69 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}\begin{array}{l}{H}_{0}\ne 0,{H}_{1}\ne 0,{L}_{1}=0,\\ \lambda =-4\beta {H}_{1}^{2},\alpha =-\displaystyle \frac{1}{7}\left(2{H}_{1}\right).\end{array}\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )=2{H}_{1}\left(\tanh \left(\displaystyle \frac{7\xi }{2}\right)+1\right)+{H}_{0}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}\begin{array}{rcl}u(x,y,t) & = & 2{H}_{1}\left(\tanh \left(\displaystyle \frac{7}{2}\left(-4\beta {H}_{1}^{2}t\right.\right.\right.\\ & & \left.\left.\left.-\displaystyle \frac{2{H}_{1}x}{7}+\kappa +\beta y\right)\right)+1\right)+{H}_{0}.\end{array}\end{eqnarray}$
Family 7: For [ω1, ω2, ω3, ω4] = [−12, −12, −11, 10] and [η1, η2, η3, η4] = [10, −1, 10, −1], equation (6 ) has the following form:72 ) into (43 ), we obtain:
$\begin{eqnarray}{ \mathcal F }(\xi )=\displaystyle \frac{12\left({{\rm{e}}}^{11\xi }+1\right)}{11{{\rm{e}}}^{11\xi }-10}.\end{eqnarray}$
Substituting ( $\begin{eqnarray}{ \mathcal G }(\xi )=\displaystyle \frac{{L}_{1}\left(11{{\rm{e}}}^{11\xi }-10\right)}{12\left({{\rm{e}}}^{11\xi }+1\right)}+\displaystyle \frac{12{H}_{1}\left({{\rm{e}}}^{11\xi }+1\right)}{11{{\rm{e}}}^{11\xi }-10}+{H}_{0}.\end{eqnarray}$
Case 7.1:73 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=0,{L}_{1}=-\displaystyle \frac{1}{7}(88\alpha ),\lambda =-121{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-\displaystyle \frac{22\alpha \left(11{{\rm{e}}}^{11\xi }-10\right)}{21\left({{\rm{e}}}^{11\xi }+1\right)}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}-\displaystyle \frac{22\alpha \left(11{{\rm{e}}}^{11\left(\kappa -121{\alpha }^{2}\beta t+\alpha x+\beta y\right)}-10\right)}{21\left({{\rm{e}}}^{11\left(\kappa -121{\alpha }^{2}\beta t+\alpha x+\beta y\right)}+1\right)}.\end{eqnarray}$
Case 7.2:73 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=-\displaystyle \frac{1}{63}(605\alpha ),{L}_{1}=0,\lambda =-121{\alpha }^{2}\beta .\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-\displaystyle \frac{2420\alpha \left({{\rm{e}}}^{11\xi }+1\right)}{21\left(11{{\rm{e}}}^{11\xi }-10\right)}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS ( $\begin{eqnarray}u(x,y,t)={H}_{0}-\displaystyle \frac{2420\alpha \left({{\rm{e}}}^{11\left(\kappa -121{\alpha }^{2}\beta t+\alpha x+\beta y\right)}+1\right)}{21\left(11{{\rm{e}}}^{11\left(\kappa -121{\alpha }^{2}\beta t+\alpha x+\beta y\right)}-10\right)}.\end{eqnarray}$
Case 7.3:73 ), equation (42 ) then provides:40 ) is acquired, as follows:
$\begin{eqnarray*}{H}_{0}\ne 0,{H}_{1}=-\displaystyle \frac{1}{63}(605\alpha ),{L}_{1}=0,\beta =-\displaystyle \frac{\lambda }{121{\alpha }^{2}}.\end{eqnarray*}$
Inserting the values of the above constants into ( $\begin{eqnarray*}{ \mathcal G }(\xi )={H}_{0}-\displaystyle \frac{2420\alpha \left({{\rm{e}}}^{11\xi }+1\right)}{21\left(11{{\rm{e}}}^{11\xi }-10\right)}.\end{eqnarray*}$
Accordingly, an exact soliton solution of BS equation ( $\begin{eqnarray}u(x,y,t)={H}_{0}-\displaystyle \frac{2420\alpha \left({{\rm{e}}}^{11\left(\kappa +\lambda t+\alpha x-\tfrac{\lambda y}{121{\alpha }^{2}}\right)}+1\right)}{21\left(11{{\rm{e}}}^{11\left(\kappa +\lambda t+\alpha x-\tfrac{\lambda y}{121{\alpha }^{2}}\right)}-10\right)}.\end{eqnarray}$
4. Physical interpretation of the obtained solutions
The dynamical and physical behaviors of the analytic wave solutions of the nonlinear partial differential equations are always preferable for an accurate understanding of the behavior of these solutions. In this section, we aim to discuss the physical behaviors of our newly established exact soliton solutions, singular solutions that include hyperbolic functions, rational form solutions, trigonometric functions, and exponential rational functions, using the best suitable choices of arbitrary constants in appropriate ranges by employing the computational tool Mathematica. Figures 1–7 depict the dynamics of some well-known solutions in the form of soliton solutions, bell-shaped solitons, triple solitons, combo singular solitons, breather-type waves, singular kink-shaped solitons, and novel solitary waves. The dynamics of exact soliton solutions are intensively analyzed, as follows:
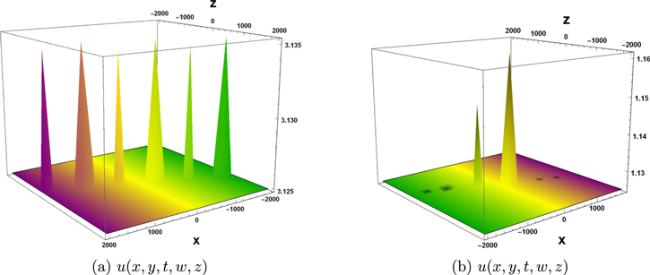
Figure 1. Two distinct dynamical shapes for equation ( |
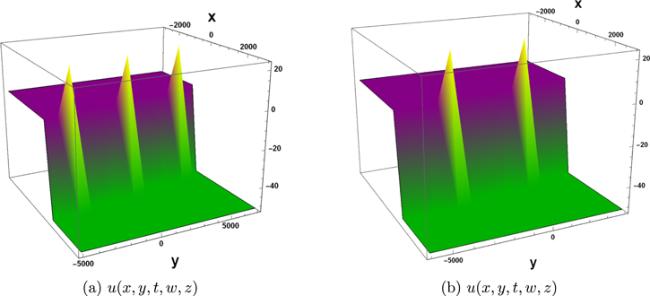
Figure 2. Two distinct dynamical shapes for equation ( |

Figure 3. Two distinct dynamical shapes of singular soliton profiles for equation ( |

Figure 4. Two distinct dynamical shapes for equation ( |
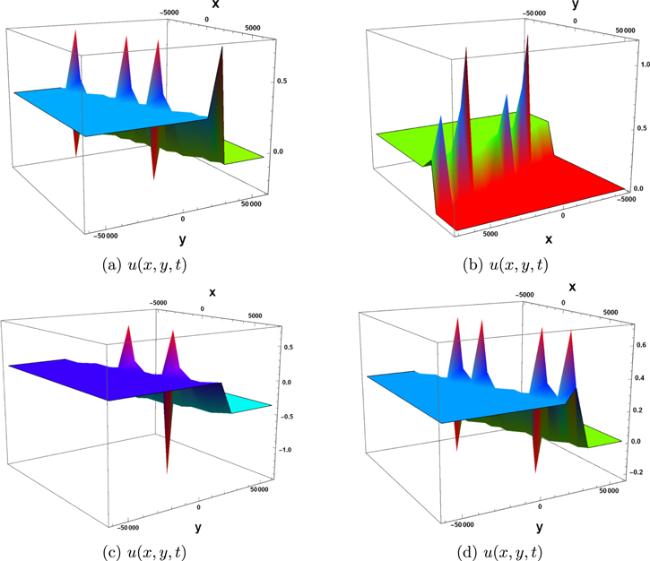
Figure 5. Four distinct dynamical shapes for equation ( |
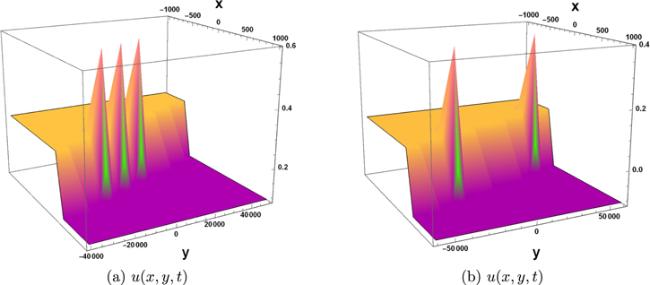
Figure 6. Two distinct dynamical shapes for equation ( |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 7. Two distinct dynamical shapes for equation ( |
Figure 1 depicts two different dynamical shapes for equations (13 ) with 1(a), showing singular solitons formed for the parameters α = 0.25, η = 0.1, ρ = 17, λ = 1.9, and H0 = 3 for the ranges of −2000 ≤ x ≤ 2000 and −2000 ≤ z ≤ 2000 at t = −5, w = 0.3, while 1(b) represents the singular double soliton wave profile for the values α = 0.25, η = 0.1, ρ = 16, λ = 1.9, and H0 = 3 for the ranges −2000 ≤ x ≤ 2000 and −2000 ≤ z ≤ 1900 at t = 3 and w = 0.2.
Figure 2 shows the two distinct dynamical shapes of equation (23 ), in which 2(a) depicts the singular soliton wave profile formed with a kink for suitable constant values α = 0.5, β = 5, ρ = 16, λ = 45, and μ = 1, for the ranges of −5000 ≤x ≤ 7000 and −3000 ≤ y ≤ 3000 at t = −5, w = 0.4; 2(b) represents double soliton wave profiles with a kink wave for the values α = 0.5, β = 5, ρ = 16, λ = 45, and μ = 1 for the ranges of −6000 ≤ x ≤ 4000 and −3000 ≤ x ≤ 3000 at t = −5 and w = 0.5.
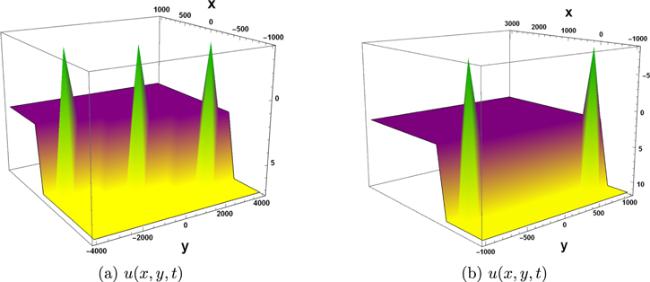
Figure 3 depicts the shapes of bell-shaped singular solitons for equation (27 ), in which 3(a) takes the different parameter values α = 0.5, β = 5, η = 0.1, ρ = 16, λ = 45, μ = 1, and H0 = 2, for the ranges of −4000 ≤ x ≤ 7000 and −3000 ≤ z ≤ 3000 at t = −1, w = 0.5, y = 0.1 and the 3(b) profile takes the values α = 0.3, β = 5, η = 0.1, ρ = 20, λ = 50, μ = 1, and H0 = 2 for the ranges of −3000 ≤ x ≤ 3000 and −5000 ≤ z ≤ 5000 at t = −1, w = 0.5, and y = 0.5.
Figure 4 shows two different shapes of bell-shaped soliton for equation (37 ), in which 4(a) represents the single-soliton profile for the values α = −0.25, β = −0.5, η = 0.2, μ = 1600, λ = 0, and H0 = 0.3, for the ranges of −4000 ≤x ≤ 2000 and −1000 ≤ z ≤ 1000 at t = −0.2, w = 0.2, and y = 0.5 and figure 4(b) represents the double solitons for the values α = −0.35, β = −0.1, η = 0.2, μ = 1500, λ = 0, and H0 = 1000 for the ranges of −2000 ≤ x ≤ 4000 and −500 ≤z ≤ 1000 at t = −0.2, w = 0.2, and y = 0.5.
Figure 5 shows the four different three-dimensional profiles of equation (46 ), which represent the interactions of solitons with kink waves for different values of constants in the ranges of −60000 ≤ x ≤ 60000 and −5000 ≤ y ≤ 7000, 5(a) α = −0.4, β = 1.5 λ = −1.7, and H0 = 0.3 at t = −2.5; 5(b) α = −0.35, β = 1.5, λ = −1.5, and H0 = 1.9 at t = −15; 5(c) α = −0.55, β = 1.5, λ = −1.5, and H0 = 0.1 at t = 2.5 and 5(d) α = −0.35, β = 1.5, λ = −1.5, and H0 = 0.3 at t = −2.5. Based on the numerical simulation, we confirm that the four dynamical structures of the acquired exact soliton solutions are also useful for analyzing the interactions between diverse solitons with kink waves.
Figure 6 depicts the interaction of solitons and kink waves for equation (48 ), in which 6(a) represents triple solitons with kink waves for the values α = −0.25, μ = 1.5, λ = −1.5, and H0 = 0.3, for the ranges of −40000 ≤x ≤ 50 000 and −1000 ≤ y ≤ 1000 at t = 5 and 6(b) shows double solitons with a kink wave profile for the values α = −0.25, μ = 2.5, λ = −1.5, and H0 = 0.1 for the ranges of −60000 ≤ x ≤ 60 000 and −1000 ≤ x ≤ 1000 at t = −5. We confirm that the dynamics of the aforementioned closed-form solutions can be used to investigate the interactions of various solitons with kink waves.
Figure 7 shows two distinct dynamical shapes for equation (74 ) that demonstrate the interaction between solitons and kink waves for the values: (a) α = 0.5, β = 5, κ = 0.1, and H0 = 2 for the ranges of −4000 ≤ x ≤ 4000 and −1000 ≤ y ≤ 1000 at t = −5; (b) α = 0.9, β = 5, κ = 0.1, and H0 = 2 for the ranges of −1000 ≤ x ≤ 1000 and −1000 ≤ y ≤ 3000 at t =0.0125.
It has been shown that the newly established solutions of the higher-dimensional Fokas equation and the (2+1)-dimensional BS equation obtained using the current proposed method (which is a generalized exponential rational function technique) differ from the works of other authors, who have commonly used the analytic techniques reported in [38–43, 47–50]. The solutions we obtained in this study are completely novel and more generalized exact solutions than the previous results.
5. Conclusions
In summary, we have studied two different NLEEs, namely the Fokas equation in (4+1)-dimensions and the breaking soliton equation in (2+1)-dimensions by utilizing the GERF method. We have successfully obtained numerous exact soliton solutions, such as single solitons, double solitons, triple solitons, quadruple solitons, elastic interaction solutions between quintuple solitons with kink-waves, localized solitary waves, and rational function solutions. To the best of our knowledge, all of the constructed closed-form solutions are completely novel and have never been reported in the literature. The solutions obtained are very useful for understanding the dynamical behaviors of the physical phenomena of these complex models. The dynamical structures of some exact-solitary wave solutions were also demonstrated graphically by assigning suitable values to the free parameters, which helps to interpret the physical behaviors of these dynamical models. All the newly formed solutions to the Fokas equation and the BS equation have a wide range of applications in areas of nonlinear sciences such as plasma physics, optical engineering, oceanography engineering, fluid dynamics, nonlinear dynamics, condensed-matter physics, and many other associated fields of engineering physics and the mathematical sciences. Generally, solitary wave solutions provide justification and additional explanation for dispersion management strategies. Furthermore, the dynamical behaviour of solitary wave profiles suggests the existence of an overarching theory for estimating the effects of multiplexing in many physical systems. The computerized symbolic work and extracted solutions show that the current method is effective, robust, and straightforward. Many other NLEEs can be solved using the efficient GERF method.