The present paper deals with the Sharma–Tasso–Olver–Burgers equation (STOBE) and its conservation laws and kink solitons. More precisely, the formal Lagrangian, Lie symmetries, and adjoint equations of the STOBE are firstly constructed to retrieve its conservation laws. Kink solitons of the STOBE are then extracted through adopting a series of newly well-designed approaches such as Kudryashov and exponential methods. Diverse graphs in 2 and 3D postures are formally portrayed to reveal the dynamical features of kink solitons. According to the authors’ knowledge, the outcomes of the current investigation are new and have been listed for the first time.
K Hosseini, A Akbulut, D Baleanu, S Salahshour. The Sharma-Tasso-Olver-Burgers equation: its conservation laws and kink solitons[J]. Communications in Theoretical Physics, 2022, 74(2): 025001. DOI: 10.1088/1572-9494/ac4411
1. Introduction
Partial differential equations (PDEs) particularly their nonlinear regimes are applied to model a wide variety of phenomena in the extensive areas of science and engineering. As useful tools for simulating many nonlinear phenomena, such models play a pivotal role in progressing the real world. During the past few decades, one of the major goals has been the construction of novel approaches to extract solitons for PDEs. In the last years, several well-organized methods have been proposed to derive solitons of PDEs, the hyperbolic function method [1–4], the modified Jacobi methods [5–8], the Kudryashov method [9–14], and the exponential method [15–20], are samples to point out.
It is noteworthy that all conservation laws of PDEs do not include physical meanings, however, such laws are essential to explore the integrability and reduction of PDEs [21, 22]. Conservation laws of PDEs can be found by using a wide range of methods such as the multiplier approach, the Noether approach, the new conservation theorem, and so on. Of these, the new conservation theorem was first established by Ibragimov and is associated with the formal Lagrangian, Lie symmetries, and adjoint equations of PDEs. Conservation laws can be derived for every symmetry of PDEs and the obtained conservation laws are referred to as trivial or non-trivial [23–29].
In the present study, the authors deal with the following Sharma–Tasso–Olver–Burgers equation [30]
and derive its conservation laws and kink solitons. As is clear from the name of equation (1), such a model consists of the Sharma–Tasso–Olver and Burgers equations. These equations have been the main concern of a lot of research works. Or-Roshid and Rashidi [31] employed an exponential method to derive the solitons of these equations. In another investigation, multiple solitons of these equations were obtained by Wazwaz in [32] through the simplified Hirota’s method. Very recently, Hu et al [33] constructed soliton, lump, and interaction solutions of a 2D-STOBE using a series of systematic ansatzes.
Kudryashov and exponential methods, as privileged approaches, have been applied by many scholars to retrieve solitons of PDEs. Particularly, the effectiveness of these methods has been demonstrated by Hosseini et al in several papers. Hosseini et al [34] derived solitons of the cubic-quartic nonlinear Schrödinger equation using the Kudryashov method. The exponential method was utilized in [35] by Hosseini et al to acquire solitons of the unstable nonlinear Schrödinger equation.
The rest of the current study is as follows: In section 2, the conservation theorem and the foundation of Kudryashov and exponential methods are given. In section 3, the formal Lagrangian, Lie symmetries, and adjoint equations of the STOBE are established to derive its conservation laws. In section 4, Kudryashov and exponential methods are adopted to seek solitons of the STOBE. Section 4 further gives diverse graphs in 2 and 3D postures to demonstrate the dynamical features of kink solitons. The achievements of the present paper are provided in section 5.
2. The conservation theorem and methods
In the current section, the conservation theorem and the foundation of Kudryashov and exponential methods are formally given.
where ${\xi }^{x}\left(x,t,u\right),$ ${\xi }^{t}\left(x,t,u\right),$ and $\eta \left(x,t,u\right)$ are known as the infinitesimals. The kth prolongation of equation (3) is retrieved by
where $\tfrac{\delta }{\delta u}$ is the variational derivative.
If the solution of equation (4) is found, then, a finite number of conservation laws for equation (2) are derived.
Every Lie point, Lie-Bäcklund, and nonlocal symmetry of equation (2) results in a conservation law. The components of the conserved vector are given by [29]
where $W=\eta -{\xi }^{j}{u}_{j},$ and ${\xi }^{i}\,$ and $\eta $ are the infinitesimal functions. The conserved vectors generated by equation (5) consist of the arbitrary solutions of the adjoint equation. Consequently, one derives a finite number of conservation laws for equation (2) by $w$ [36].
Derived conserved vectors using (5) are conservation laws of equation (2) if
where the unknowns are acquired later and $N\in {{\mathbb{Z}}}^{+}.$
Again, equations (7) and (8) together yield a nonlinear system which by solving it, solitons of equation (7) are obtained.
3. The STOBE and its conservation laws
In the present section, the conservation theorem is applied to the STOBE to derive its conservation laws. First, the formal Lagrangian is derived in the following form
If $u$ is replaced by $w$ in equation (10), then, equation (1) is not obtained. Thus, equation (1) is not self-adjoint. In such a case, one can say that $w=1$ is a solution of equation (10).
A one-parameter Lie group for equation (1) is given by
The commutator table for the above symmetries (see equation (11)) has been given in table 1.
Table 1. The commutator table for the above symmetries.
$[{X}_{i},{X}_{j}]$
${X}_{1}$
${X}_{2}$
${X}_{3}$
${X}_{1}$
$0$
$0$
${X}_{1}-\tfrac{2{c}_{2}^{2}}{9{c}_{1}}{X}_{2}$
${X}_{2}$
$0$
$0$
$\tfrac{{X}_{2}}{3}$
${X}_{3}$
$-{X}_{1}+\tfrac{2{c}_{2}^{2}}{9{c}_{1}}{X}_{2}$
$-\tfrac{{X}_{2}}{3}$
$0$
Now, conservation laws of the STOBE for all founded Lie point symmetry generators are derived. Conservation laws formulae for equation (1) are as follows
Due to the satisfaction of the divergence condition, these conservation laws are called local conservation laws. Such conservation laws are infinite trivial conservation laws. In this case, we have
Owing to the satisfaction of the divergence condition, these conservation laws are called local conservation laws. Such conservation laws are infinite trivial conservation laws. In this case, we have
Due to the satisfaction of the divergence condition, these conservation laws are called local conservation laws. Such conservation laws are infinite trivial conservation laws.
Such conserved vectors satisfy the divergence condition, so, they are trivial conservation laws.
4. The STOBE and its solitons
In the present section, Kudryashov and exponential methods are adopted to seek solitons of the STOBE. The present section further gives diverse graphs in 2 and 3D postures to demonstrate the dynamical features of kink solitons. To start, we establish a transformation as follows
From $\tfrac{{{\rm{d}}}^{3}U\left({\epsilon }\right)}{{\rm{d}}{{\epsilon }}^{3}}$ and ${U}^{2}\left({\epsilon }\right)\tfrac{{\rm{d}}U\left({\epsilon }\right)}{{\rm{d}}{\epsilon }}$ in equation (17), one can get [10]
$N+3=3N+1\Rightarrow N=1.$
4.1. Kudryashov method
Equation (6) and $N=1$ offer taking the following solution
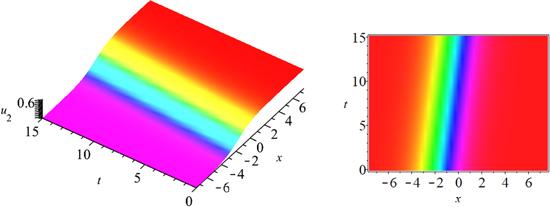
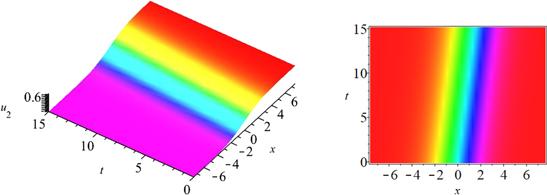
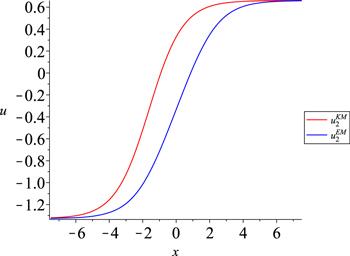
Figure 2 gives the dynamical features of the kink soliton ${u}_{2}\left(x,t\right)$ for ${a}_{1}=-1,$ ${b}_{0}=1,$ ${b}_{2}=1,$ ${c}_{1}=0.15,$ ${c}_{2}=0.15,$ and $a=2.7.$ Furthermore, the physical behaviors of ${u}_{2}^{{\rm{K}}{\rm{M}}}$ and ${u}_{2}^{{\rm{E}}{\rm{M}}}$ for above parameters have been given in figure 3 when $t=0.$
According to the authors’ knowledge, the outcomes of the current investigation are new and have been listed for the first time.
The authors successfully used a symbolic computation system to check the correctness of the outcomes of the current paper.
Figure 3. ${u}_{2}^{{\rm{K}}{\rm{M}}}$ and ${u}_{2}^{{\rm{E}}{\rm{M}}}$ for above parameters when $t=0.$
5. Conclusion
The principal aim of the current paper was to explore a newly well-established model known as the Sharma–Tasso–Olver–Burgers equation and derive its conservation laws and kink solitons. The study proceeded systematically by constructing the formal Lagrangian, Lie symmetries, and adjoint equations of STOBE to acquire its conservation laws. Besides, kink solitons of the STOBE were formally established using Kudryashov and exponential methods. Various plots in 2 and 3D postures were graphically represented to observe the dynamical characteristics of kink solitons. Based on information from the authors, the outcomes of the current investigation are new and have been listed for the first time. The authors’ suggestion for future works is employing newly well-organized methods [38–44] to acquire other wave structures of STOBE.
SeadawyA RKumarDHosseiniKSamadaniF2018 The system of equations for the ion sound and Langmuir waves and its new exact solutions Results Phys.9 1631 1634
RezazadehHKumarDSulaimanT ABulutH2019 New complex hyperbolic and trigonometric solutions for the generalized conformable fractional Gardner equation Modern Phys. Lett. B33 1950196
El-SheikhM M ASeadawyA RAhmedH MArnousA HRabieW B2020 Dispersive and propagation of shallow water waves as a higher order nonlinear Boussinesq-like dynamical wave equations Physica A537 122662
HosseiniKSalahshourSMirzazadehMAhmadianABaleanuDKhoshrangA2021 The (2 + 1)-dimensional Heisenberg ferromagnetic spin chain equation: its solitons and Jacobi elliptic function solutions Eur. Phys. J. Plus136 206
HosseiniKBekirAKaplanM2017 New exact traveling wave solutions of the Tzitzéica-type evolution equations arising in non-linear optics J. Mod. Opt. 64 1688 1692
12
KumarDSeadawyA RJoardarA K2018 Modified Kudryashov method via new exact solutions for some conformable fractional differential equations arising in mathematical biology Chin. J. Phys. 56 75 85
13
KumarD DarvishiM T JoardarA K2018 Modified Kudryashov method and its application to the fractional version of the variety of Boussinesq-like equations in shallow water Opt. Quantum Electron. 50 128
14
HosseiniKKorkmazABekirASamadaniFZabihiATopsakalM2021 New wave form solutions of nonlinear conformable time-fractional Zoomeron equation in (2+1)-dimensions Waves Random Complex Media31 228 238
HosseiniKMirzazadehMZhouQLiuYMoradiM2019 Analytic study on chirped optical solitons in nonlinear metamaterials with higher order effects Laser Phys.29 095402
HosseiniKOsmanM SMirzazadehMRabieiF2020 Investigation of different wave structures to the generalized third-order nonlinear Scrödinger equation Optik206 164259
HosseiniKMirzazadehMRabieiFBaskonusH MYelG2020 Dark optical solitons to the Biswas–Arshed equation with high order dispersions and absence of self-phase modulation Optik209 164576
HosseiniKAnsariRZabihiAShafaroodyAMirzazadehM2020 Optical solitons and modulation instability of the resonant nonlinear Schrӧdinger equations in (3 + 1)-dimensions Optik209 164584
OlverP J1993Application of Lie Groups to Differential Equations New York Springer
23
NazRMahomedF MMasonD P2008 Comparison of different approaches to conservation laws for some partial differential equations in fluid mechanics Appl. Math. Comput.205 212 230
CelikNSeadawyA ROzkanY SYasarE2021 A model of solitary waves in a nonlinear elastic circular rod: abundant different type exact solutions and conservation laws Chaos Solitons Fractals143 110486
WangGKaraA HFakharKVega-GuzmandJBiswasA2016 Group analysis, exact solutions and conservation laws of a generalized fifth order KdV equation Chaos Solitons Fractals86 8 15
IbragimovN HKhamitovaRAvdoninaE DGaliakberovaL R2015 Conservation laws and solutions of a quantum drift-diffusion model for semiconductors Int. J. Non Linear Mech.77 69 73
HuXMiaoZLinS2021 Solitons molecules, lump and interaction solutions to a (2 + 1)-dimensional Sharma–Tasso–Olver–Burgers equation Chin. J. Phys.74 175 183
HosseiniKSamadaniFKumarDFaridiM2018 New optical solitons of cubic-quartic nonlinear Schrödinger equation Optik157 1101 1105
35
HosseiniKZabihiASamadaniFAnsariR2018 New explicit exact solutions of the unstable nonlinear Schrödinger’s equation using the expa and hyperbolic function methods Opt. Quantum Electron. 50 82
AkbulutATaşcanF2018 On symmetries, conservation laws and exact solutions of the nonlinear Schrödinger–Hirota equation Waves Random Complex Media28 389 398
KaabarM K AKaplanMSiriZ2021 New exact soliton solutions of the (3 + 1)-dimensional conformable Wazwaz–Benjamin–Bona–Mahony equation via two novel techniques J. Funct. Spaces2021 4659905
KaabarM K AMartínezFGómez‐AguilarJ FGhanbariBKaplanMGünerhanH2021 New approximate analytical solutions for the nonlinear fractional Schrödinger equation with second‐order spatio‐temporal dispersion via double Laplace transform method Math. Methods Appl. Sci.44 11138 11156
ZadaLNawazRNisarK STahirMYavuzMKaabarM K AMartínezF2021 New approximate-analytical solutions to partial differential equations via auxiliary function method Partial Differ. Equ. Appl. Math.4 100045
KumarAIlhanECiancioAYelGBaskonusH M2021 Extractions of some new travelling wave solutions to the conformable Date-Jimbo-Kashiwara-Miwa equation AIMS Math.6 4238 4264




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}