



1. Introduction
2. Model description
${z}_{i}(t)={({z}_{i1}(t),{z}_{i2}(t),...,{z}_{in}(t))}^{T},i=1,\,2,...$,N are the state vector of the $i$th node in drive systems, ${w}_{i}(t)={({w}_{i1}(t),{w}_{i2}(t),...,{w}_{in}(t))}^{{\rm{T}}}$, $i=1,\,2,\,...,\,N$ is the state vector of the $i$th node in the response system. ${f}_{i}({x}_{i}),{g}_{i}({y}_{i}),\,{h}_{i}({z}_{i}),\,{l}_{i}({w}_{i})\in {{\boldsymbol{R}}}^{n\times w}$ are the continuous nonlinear function matrices, ${{\boldsymbol{R}}}^{n\times w}$ denotes the $n\times w$ order matrix on the real number field R. ${\rm{\Delta }}{f}_{i}({x}_{i},t)\,,\,{\rm{\Delta }}{g}_{i}({y}_{i},t),\,{\rm{\Delta }}{h}_{i}({z}_{i},t),\,{\rm{\Delta }}{l}_{i}({w}_{i},t)$ are the disturbances. ${{\rm{\Gamma }}}_{1},{{\rm{\Gamma }}}_{2}$ are the inner coupling matrices; ${A}_{1}={({a}_{ij})}_{N\times N},{B}_{1}={({b}_{ij})}_{N\times N}$ are weight configuration matrices, which represent the topological structure of the network. If nodes $i$ and $j$ $\left(j\ne i\right)$ are connected, then ${a}_{ij}\ne 0,{b}_{ij}\ne 0;$ if nodes $i$ and $j$ $\left(j\ne i\right)$ have no connection, then ${a}_{ij}={a}_{ji}=0,{b}_{ij}={b}_{ji}=0.$ The diagonal elements of matrix ${A}_{1},{B}_{1}$ are defined as ${a}_{ii}\,=-\displaystyle {\sum }_{j=1,j\ne i}^{N}{a}_{ij},\,{b}_{ii}=-\displaystyle {\sum }_{j=1,j\ne i}^{N}{b}_{ij},i=1,\mathrm{2..}.,N.$ $\tau (t)\geqslant 0$ denotes the time-varying delays.
For the fractional-order complex dynamic networks (
The Riemann–Liouville fractional integral of order $\alpha $ for a function $f(t):\left[{t}_{0},\right.\left.+\infty \right)\to R$ is defined as
The Caputo’s derivative for function $f(t)$ with fractional order $\alpha $ is defined by
${}_{{t}_{0}}{}^{C}D_{t}^{\alpha }({}_{{t}_{0}}{}^{R}I_{t}^{\beta }f(t))={}_{{t}_{0}}{}^{C}D_{t}^{\alpha -\beta }f(t),$ when $\alpha \geqslant \beta \geqslant 0.$ Especially, when $\alpha =\beta ,$ ${}_{{t}_{0}}{}^{C}D_{t}^{\alpha }({}_{{t}_{0}}{}^{R}I_{t}^{\beta }f(t))=f(t)$ [14].
External disturbances ${\rm{\Delta }}{f}_{i}({x}_{i},t),{\rm{\Delta }}{g}_{i}({y}_{i},t),{\rm{\Delta }}{h}_{i}({z}_{i},t),{\rm{\Delta }}{l}_{i}({w}_{i},t)$ are bounded, and there exist positive constants ${d}_{i}^{x},\,{d}_{i}^{y},\,{d}_{i}^{z},{d}_{i}^{w}$ such that $\left|{\rm{\Delta }}{f}_{i}({x}_{i},t)\right|\,\leqslant {d}_{i}^{x},\,\left|{\rm{\Delta }}{g}_{i}({y}_{i},t)\right|\leqslant {d}_{i}^{y},\left|{\rm{\Delta }}{h}_{i}({z}_{i},t)\right|\leqslant {d}_{i}^{z},\left|{\rm{\Delta }}{l}_{i}({w}_{i},t)\right|\leqslant {d}_{i}^{w}.$
Because ${M}_{1},{M}_{2},\text{}{M}_{3}$ are constant matrices, there exists a positive constant  , satisfies λmax (${M}_{1},{M}_{2},\text{}{M}_{3}$)
, satisfies λmax (${M}_{1},{M}_{2},\text{}{M}_{3}$)  . Under Assumption 1, there exists a positive constant
. Under Assumption 1, there exists a positive constant  , such that
, such that

The time-varying delay $\tau (t)$ is a continuously differentiable function and satisfies $0\leqslant \dot{\tau }(t)\leqslant \varepsilon \lt 1,$ so it is easy to get
Let x(t) ∈ Rn be a differentiable vector. Then, for any time instant t ≥ t0 [40]
One can expect an equality in (
3. Controller design

With the differences of ${M}_{1},{M}_{2},{M}_{3},$ combination projection synchronization can be changed into (a) combination complete synchronization (${M}_{1}={M}_{2}={M}_{3}=I,$ $I$ is an identity matrix), (b) combination anti-synchronization(${M}_{1}={M}_{2}={M}_{3}=-I$), (c) projective synchronization (there are two zero matrices in ${M}_{1},{M}_{2},{M}_{3}.$), and (d) control problem(${M}_{1},{M}_{2},{M}_{3}$ are all zero matrices.).
At present, there is little research on combination synchronization for fractional-order complex networks. Combination synchronization can realize synchronization between multi-drive and multi-response systems, which is a more generalized form of synchronization.
When $\tau (t)$ is constant, the time-varying delay couplings problem is transformed into constant time-delay coupling. When $\tau (t)$ is constant, Assumption 2 is also satisfied, the control method in this article is also applicable to constant time-delay coupling.
The combination projective synchronization can be extended to synchronize among many different complex networks, that is $e=\displaystyle {\sum }_{i=1}^{n}{x}_{i}-\displaystyle {\sum }_{j=1}^{m}{y}_{j}=0,$ where ${x}_{i},$ ${y}_{j}$ represent drive systems and response systems respectively and $m,n$ are positive integers [31].
4. Numerical simulation
Considering a fractional-order complex dynamic network with $N=3,n=3,$ the three drive systems are composed of three chaotic systems with time-varying delay couplings.
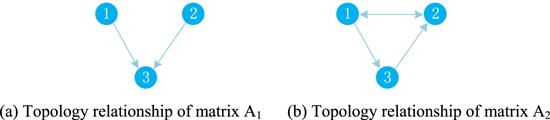
Figure 1. Topological relationship between nodes. |
Considering a fractional-order complex dynamic network with $N=6,n=3,$ the drive systems are composed of six chaotic systems with time-varying delay couplings.
$\begin{eqnarray*}\begin{array}{l}\left[\begin{array}{l}{D}^{\alpha }{z}_{i1}(t)\\ {D}^{\alpha }{z}_{i2}(t)\\ {D}^{\alpha }{z}_{i3}(t)\end{array}\right]\,=\,\left[\begin{array}{c}0\\ {z}_{i2}(t)-{z}_{i1}(t){z}_{i3}(t)\\ {z}_{i1}(t){z}_{i2}(t)\end{array}\right]+\left[\begin{array}{l}{d}_{i1}^{z}(t)\\ {d}_{i2}^{z}(t)\\ {d}_{i3}^{z}(t)\end{array}\right]\\ \,+{c}_{1}(t)\displaystyle \sum _{j=1}^{6}{a}_{ij}^{1}{{\rm{\Gamma }}}_{1}{z}_{j}(t)+{c}_{2}(t)\displaystyle \sum _{j=1}^{6}{a}_{ij}^{2}{{\rm{\Gamma }}}_{2}{z}_{j}(t-\tau (t)).\\ i=1,2,\cdots ,6.\end{array}\end{eqnarray*}$
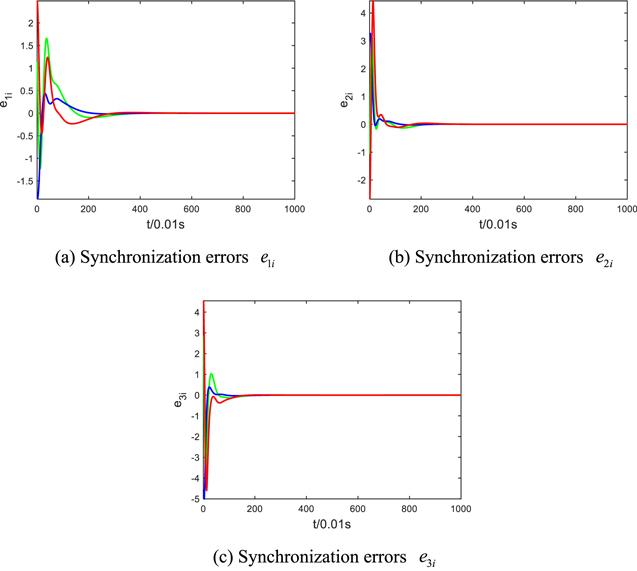
Figure 2. When q = 0.88, the trajectory of each node for the error system. |

Figure 3. Topological relationship between nodes. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
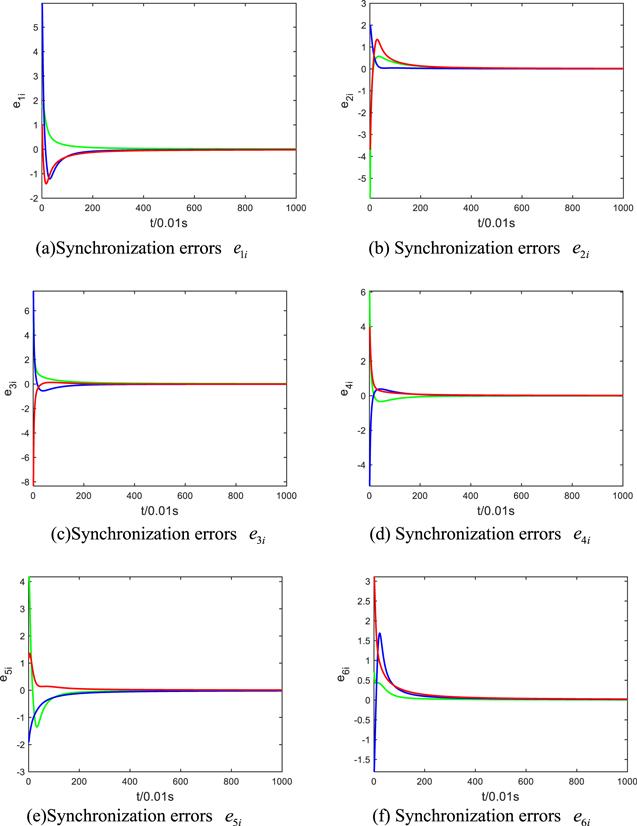
Figure 4. When q = 0.95, the trajectory of each node for the error system. |