



1. Introduction
| (1)Considering the importance of PS and proportional delay, the PS problem of CVINNs with multi-proportional delays is studied for the first time. | |
| (2)To maintain the originality of the considered system and reduce computational pressure, our work is carried out by a non-separation approach instead of decomposition. | |
| (3)To achieve the PS of the addressed CVINNs with multi-proportional delays, by applying the exponential transformation and designing an appropriate controller, a new criterion for PS is proposed based on the Lyapunov function approach and some inequalities techniques. |
2. Preliminaries
On one hand, as a special type of delay, the proportional delay is a time-varying and unbounded delay, which is different from constant delay, distributed delay, and so on. In many fields, such as control science, and physical and biological systems, it can be found that proportional delay plays an important role. On the other hand, as a special neural network, CVINNs have attracted extensive attention because of their rich biological and engineering background. Compared with first-order neural networks, the dynamic behaviors of the second-order CVINNs are more complex and it is more difficult to deal with them. So far, there have been few reports on CVINNs with proportional delays [21, 31]. Here, we will continue to study deeply the CVINNs model with multi-proportional delays and develop the relative achievement for the PS problem.
In realizing the PS of the addressed model, the main difficulty and challenge are how to obtain the power exponential term ${t}^{-\lambda }$ according to the definitions of polynomial stability and synchronization. Here, firstly, the exponential transformation is involved [34]. Then, by designing a suitable controller and constructing an appropriate Lyapunov function, our purpose is achieved.
In this paper, activation functions ${f}_{r}(\cdot )$ and ${g}_{r}(\cdot )$ are assumed to satisfy the following Lipschitz conditions:
[38]. Let $v(t)={\left({v}_{1}(t),{v}_{2}(t),\ldots ,{v}_{n}(t)\right)}^{{\rm{T}}}$ and $\hat{\phi }(s)={\left({\hat{\phi }}_{1}(s),{\hat{\phi }}_{2}(s),\ldots ,{\hat{\phi }}_{n}(s)\right)}^{{\rm{T}}}$, system (
[34]. Let $u(t)={\left({u}_{1}(t),{u}_{2}(t),\ldots ,{u}_{n}(t)\right)}^{{\rm{T}}}$ and $\phi (s)={\left({\phi }_{1}(s),{\phi }_{2}(s),\ldots ,{\phi }_{n}(s)\right)}^{{\rm{T}}}$, systems (
3. Main result
Here, the above controller (
Suppose Assumption 1 holds, if there exist positive numbers kj, ${\eta }_{j}$, ${\rho }_{j}$, ${\sigma }_{j}$, and $\varepsilon \gt 0$ such that the following inequalities hold:
Construct the Lyapunov function as below
Sufficient conditions for polynomial synchronization based on CVINNs systems with multi-proportional delays are established in theorem 1. In our work, by constructing Lyapunov functions and making full use of inequality techniques, the expected results are obtained. To the best of our knowledge, this is the first time that the problem of polynomial synchronization has been discussed under CVINNs.
At present, the methods for dealing with CVINNs are mainly divided into two types, namely the separation method [20, 21, 23–27] and the non-separation method [31–33]. The former can increase the number of variables and dimensions of systems whereas the latter can keep the originality of systems and reduce the limitations. Obviously, the advantages of the latter are more typical, which inspires us to fully utilize the non-separation method to achieve the goal.
As we know, it is the first time that the PS problem of CVINNs with multi-proportional delays is studied. Here, we use the non-separation method which can simplify the process and result. Moreover, we also consider the multi-proportional delays which own the easier controllability. Therefore, our work is very important in theory and application value.
There are many types of time delays, such as time-varying delays, proportional delays, distributed delays, and so on. As we know, a large number of achievements involve time-varying delays, for example, proportional-integral synchronization [47] and finite-time synchronization of Markovian coupled neural networks [48]. Different from these results, this paper focuses on multi-proportional delays, which are unbounded delays and widely used in the light absorption of stellar matter, nonlinear dynamic systems, and many other fields.
4. Numerical example
Consider the following two-dimension drive system
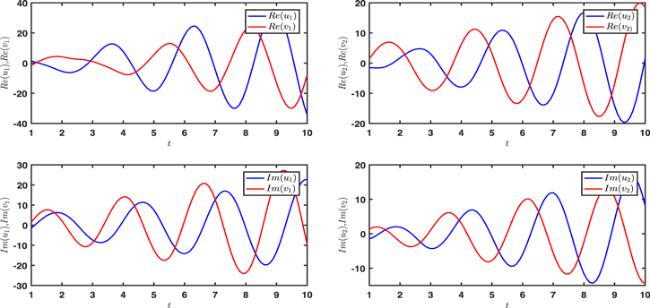
Figure 1. The curves of the variables u1, v1, u2, v2 without the controller. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
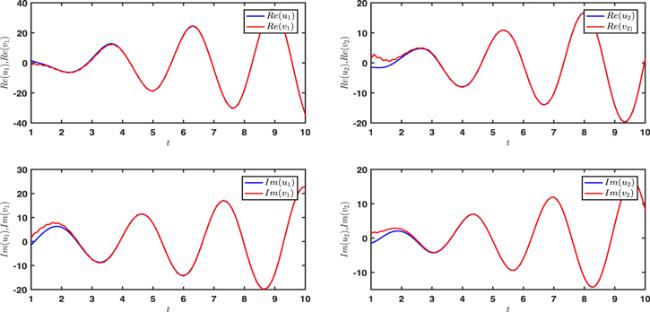
Figure 2. The curves of the variables u1, v1, u2, v2 with the controller. |