



1. Introduction
| i | (i)$\varphi :{{\mathbb{R}}}_{+}\to {{\mathbb{R}}}_{+}$ and has a limited number of jump discontinuities in every compact interval; |
| ii | (ii)φ and is non-decreasing and φ(x) ∈ [0, 1] for all x ∈ [0, 1]. |
2. Stability analysis of the model (1 )
| i | (i)The equilibrium point ${E}_{1}=(0,0)$ is always unstable. |
| ii | (ii)The rumor-free equilibrium point ${E}_{0}=(1,0)$ is locally asymptotically stable if $\sigma +b\gt \beta $ and is unstable if $\sigma +b\lt \beta $. |
| iii | (iii)The rumor-spreading equilibrium point ${E}_{* }$ is locally asymptotically stable if it exists, i.e. when $\sigma +b\lt \beta $. |
The Jacobian matrix of the system (
Similarly, the Jacobian matrix evaluating at E0 is given by
Lastly, the Jacobian matrix evaluating at E* is given by
By transforming the model (
| i | (i)The rumor-free equilibrium point E0 is not only locally asymptotically stable but also globally asymptotically stable with respect to the set ${\rm{\Omega }}-\{(0,0)\}$ when $\sigma +b\gt \beta $. |
| ii | (ii)The rumor-spreading equilibrium point E* is not only locally asymptotically stable but also globally asymptotically stable with respect to the set ${{\rm{\Omega }}}^{* }$ defined in ( |
Proof of Part (i) Consider a Lyapunov function candidate ${V}_{0}:{\rm{\Omega }}-\{(0,0)\}\to {{\mathbb{R}}}_{+}$ given by
Proof of Part (ii) Consider a Lyapunov function candidate ${V}_{* }:{{\rm{\Omega }}}^{* }\to {{\mathbb{R}}}_{+}$ defined by
3. Stability analysis of the model (2 )
3.1. Stability of the model with smooth control functions
If $q\varphi (0)+a\,+\,b\lt \sigma $, then the model (
To determine possible positive equilibrium points, we consider the following system of algebraic equations
| • | (i)The equilibrium point ${{ \mathcal E }}_{1}=(0,0)$ is always unstable. |
| • | (ii)The rumor-free equilibrium point ${{ \mathcal E }}_{0}=(1,0)$ is locally asymptotically stable if $a+b+q\varphi (0)\gt \sigma $ and is unstable if $a+b+q\varphi (0)\lt \sigma $. |
| • | (iii)The rumor-spreading equilibrium point ${{ \mathcal E }}_{* }$ is locally asymptotically stable if it exists. |
The Jacobian matrix of the system (
Similarly, we have
Lastly, the Jacobian matrix evaluating at ${{ \mathcal E }}_{* }$ is given by
If $a+b+q\varphi (0)\gt \sigma $, then the rumor-free equilibrium point ${{ \mathcal E }}_{0}=(1,0)$ is not only locally asymptotically stable but also globally asymptotically stable with respect to the set ${\rm{\Omega }}-\{{{ \mathcal E }}_{1}\}$.
We consider a Lyapunov function candidate ${L}_{0}:{\rm{\Omega }}-\{{{ \mathcal E }}_{1}\}\to {{\mathbb{R}}}_{+}$ given by
The rumor-spreading equilibrium point ${{ \mathcal E }}_{* }$ is not only locally asymptotically stable but also globally asymptotically stable with respect to the set ${{\rm{\Omega }}}^{* }$ given in (
We consider a Lyapunov candidate function ${L}_{* }:{{\rm{\Omega }}}^{* }\to {{\mathbb{R}}}_{+}$ defined by
3.2. A note on stability analysis of the model with discontinuous control functions
4. Numerical examples
In this example, we investigate global dynamics of the model (
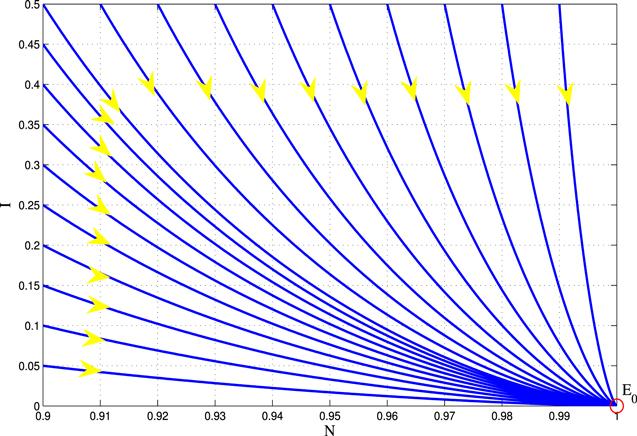
Figure 1. Global dynamics of the model ( |
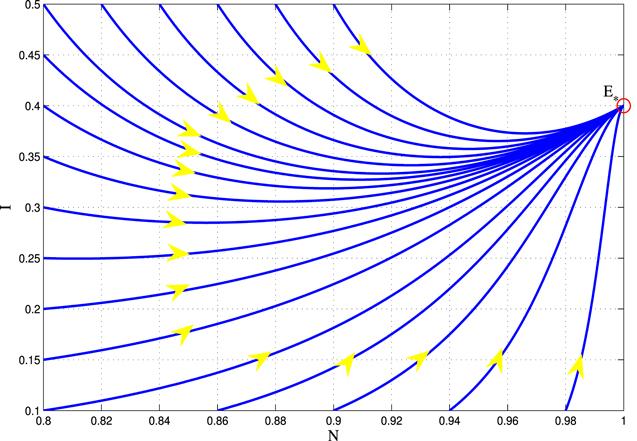
Figure 2. Global dynamics of the model ( |
Table 1. The set of the parameters used in Example |
| Case | b | σ | β | Remark | GAS |
|---|---|---|---|---|---|
| 1 | 0.25 | 0.4 | 0.3 | σ + b > β | E0 = (1, 0) |
| 2 | 0.10 | 0.2 | 0.5 | σ + b < β | E* = (1, 0.4) |
Table 2. The set of the parameters used in Example |
| Case | a | b | q | σ | Remark | GAS |
|---|---|---|---|---|---|---|
| 1 | 0.25 | 0.4 | 0.5 | 0.3 | a + b + qφ(0) > σ | ${{ \mathcal E }}_{0}=(1,0)$ |
| 2 | 0.1 | 0.2 | 0.45 | 0.55 | a + b + qφ(0) < σ | ${{ \mathcal E }}_{* }=(1,0.2644)$ |
In this example, we consider the model (
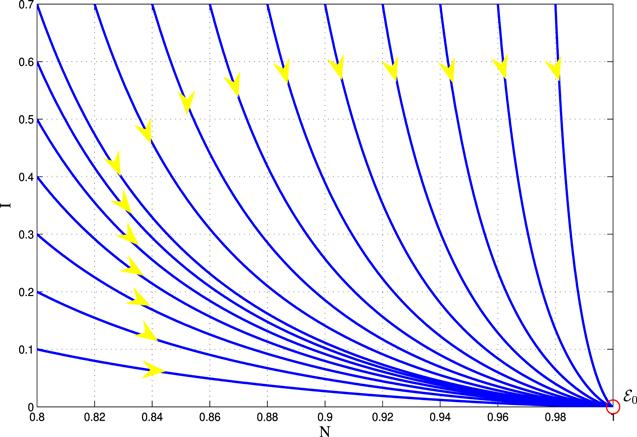
Figure 3. Global dynamics of the model with control strategies ( |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 4. Global dynamics of the model with control strategies ( |