



1. Introduction
2. Spectral problem and Lax pair
2.1. The spatial spectral problem
Let the transform matrix R satisfies
Using (
2.2. The time spectral problem
Suppose that R satisfies the linear equation
As $\omega (k)=0$, the equation (
We first use the polynomial dispersion relation only ${\rm{\Omega }}={{\rm{\Omega }}}_{p}=4{\rm{i}}{k}^{3}{\sigma }_{3}$. From equations (
2.3. Gauge equivalence
The cmKdV equation (
Making a reversible transformation $g(x,t)$,
3. Recursive operators and cmKdV hierarchy
Q defined by (
For the special case when $n=2,{\alpha }_{n}=2{\rm{i}}$, the hierarchy (
Differentiating the expression of Q with respect to t yields
4. N-soliton solutions of cmKdV equation
Suppose that ${k}_{j}$ and ${\bar{k}}_{j}$ are 2N discrete spectrals in complex plane ${\mathbb{C}}$. we choose a spectral transform matrix R as
Substituting (
5. Application of the N-soliton formula
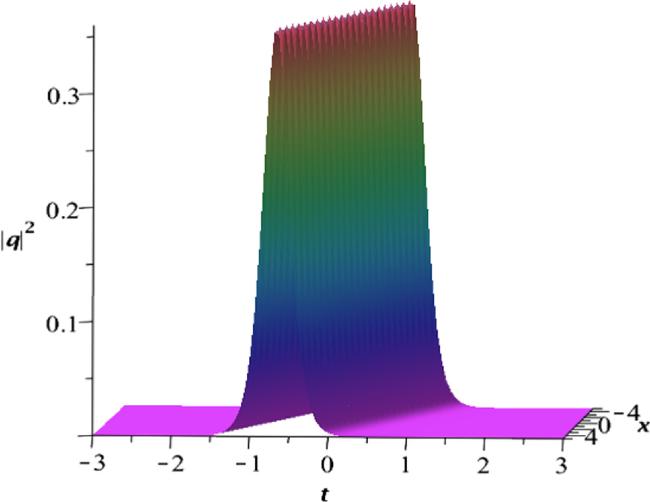
Figure 1. One-soliton solution of equation ( |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
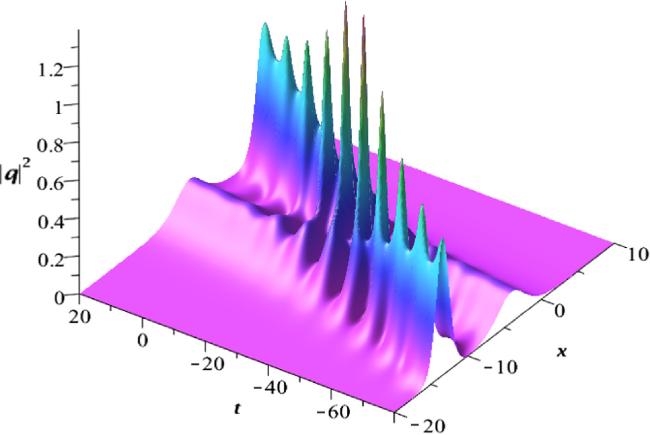
Figure 2. Two-solion solution of equation ( |