In this paper, we consider the (2+1)-dimensional Chaffee–Infante equation, which occurs in the fields of fluid dynamics, high-energy physics, electronic science etc. We build Bäcklund transformations and residual symmetries in nonlocal structure using the Painlevé truncated expansion approach. We use a prolonged system to localize these symmetries and establish the associated one-parameter Lie transformation group. In this transformation group, we deliver new exact solution profiles via the combination of various simple (seed and tangent hyperbolic form) exact solution structures. In this manner, we acquire an infinite amount of exact solution forms methodically. Furthermore, we demonstrate that the model may be integrated in terms of consistent Riccati expansion. Using the Maple symbolic program, we derive the exact solution forms of solitary-wave and soliton-cnoidal interaction. Through 3D and 2D illustrations, we observe the dynamic analysis of the acquired solution forms.
Nursena Günhan Ay, Emrullah Yaşar. The residual symmetry, Bäcklund transformations, CRE integrability and interaction solutions: (2+1)-dimensional Chaffee–Infante equation[J]. Communications in Theoretical Physics, 2023, 75(11): 115004. DOI: 10.1088/1572-9494/acf8b6
1. Introduction
Nature's attractive nonlinearity is the most crucial constraint to comprehending it at its most fundamental level. This approach is widely accepted by researchers. The study of many types of nonlinear ordinary and partial differential equations (PDEs) is essential in the mathematical modeling of complicated systems that fluctuate over time. Physical and natural sciences, neurophysics, population ecology, economics, biomathematics, chemistry, diffusion, biology, heat, and general relativity are all used to develop these models.
Nonlinear evolution equations (NLEEs) can describe many nonlinear physical occurrences in applied science and technology. As a result, finding the exact solutions to the relevant NLEEs is critical for enhancing our understanding of nonlinear events and applying them to practical issues. Therefore, numerous studies have been carried out on this subject [1–7]. Many ways for achieving exact solutions to NLEEs have been proposed for example Lie symmetry analysis [8, 9], Hirota's method [10–12], simplified Hirota's method [3, 13], extended tanh method [14] and numerous other techniques [15, 16]. Some studies to help us understand complex nonlinear wave models, including (2+1) dimensional nonlinear models it is known very recently that N-soliton solutions have been systematically studied by the Hirota bilinear method [12] and by Riemann–Hilbert problems, particularly for higher-order integrable equations [6, 7]. Furthermore, when it comes to symmetry analysis, the approach plays a significant role in analyzing the properties of PDEs [17–21]. Nonclassical symmetry [22], Lie-Bäcklund symmetry [23], and nonlocal symmetry [20] have all been extended from classical Lie symmetries.
Finding the nonlocal symmetries of PDEs is a curious issue. Nonlocal symmetries can give rise to new solutions that Lie point symmetries can not produce [17]. The work of [24] presented an approach based on conservation rules for generating nonlocally linked systems in order to achieve nonlocal symmetries. Nonlocal symmetries and nonlocal conservation rules can be investigated by examining nonlocally connected systems [17]. New approaches for building nonlocal symmetry theory and producing nonlocal symmetries have been presented over time. Nonlocal symmetries can be generated using methods such as the Darboux transformation [25, 26], the Bäcklund transformation [27], and the Lax pairs [26, 28]. The Painlevé analysis approach, [17, 29, 30] is a suitable proposed way for revealing the integrability features of PDEs. The truncated Painlevé expansion may be used to build nonlocal symmetries, as presented in [31]. Because they are remnants of the truncated Painlevé expansion, such nonlocal symmetries are now known as residual symmetries [17]. After examining several interaction solutions created by non-local symmetry reduction analysis, the consistent Riccati expansion (CRE) approach [32] was presented to investigate interactions between the soliton and other waveforms When the CRE technique is used for an integrable equation, it is considered CRE solvable.
One of the aforementioned NLEEs is the Chaffe-Infante model. Suppose that the substance diffuses in a region with concentration u(x, y, z). If ϱ(x, y, z, t) is the diffusion coefficient, then
where the variable Γ governs the proportional balance of the diffusion and non-linear elements. Hence the (1 + 1)-dimensional Chaffee–Infante equation is [33]
In this paper, we will look at the (2+1)-dimensional Chaffee–Infante equation (CI), which can be produced in the same way as the above. The (CI) equation [34]
(where α is the coefficient of diffusion and σ is the degradation coefficient) is a popular reaction-diffusion model that explains the physical processes of mass transfer and particle diffusion. It is also necessary to have a field of usage in fluid dynamics, electronic science, and many other fields of science. Another feature that makes the CI equation important is that it is the typical model of infinite-dimensional gradient systems, where the structure of the spherical attractor can be fully explained. Here, bifurcation in a system parameter that indicates the potential's steepness also increases the model's attractiveness [35]. The CI equation has been studied using the modified Khater method [35], Lie symmetry analysis [36], the first integral method [37], and a variety of other approaches [38, 39].
The following is how the paper is organized. Using the truncated Painlevé expansion, we derive the Bäcklund transformation and the residual symmetry of equation (6). To locate the residual symmetry to the localized Lie point symmetry, an expanded system of equation (6) is developed. New solutions are obtained with the help of any seed solution in section 2. In the next section, we study the CRE solvability of equation (6). In section 4 we examine the solitary wave profile and interactions profile of equation (6). In the last section we give some conclusions.
2. Residual symmetry and Bäcklund transformation
In this section, we will derive the residual symmetry of equation (6) using the truncated Painlevé expansion. Due to truncated Painlevé analysis solution of equation (6) is expressed as
where u0 = u0(x, y, t), u1 = u1(x, y, t), and f = f(x, y, t) [17]. Substituting equation (7) into equation (6) and eliminating all of the powers of $\displaystyle \frac{1}{f}$ provides us with;
Here infinitesimal parameter is denoted by ε. We can see here that the solution to equation (16) can not be found. To easily solve the preceding initial value problem, given an expanded system, one can localize the nonlocal symmetry to the localized Lie point symmetry. As a result, the new variables listed below are necessary
where ε is an arbitrary parameter. With the theorem we will provide, we will now assert that it is possible to generate a new solution from an existing one.
If u, f, ${{\rm{\Upsilon }}}_{1}$, ${{\rm{\Upsilon }}}_{2}$, ${{\rm{\Upsilon }}}_{3}$, ${{\rm{\Upsilon }}}_{4}$ is a solution of the prolonged system including (6), (9), (11), (14), then $\breve{u}$, $\breve{f}$, $\breve{{{\rm{\Upsilon }}}_{1}}$, $\breve{{{\rm{\Upsilon }}}_{2}}$, $\breve{{{\rm{\Upsilon }}}_{3}}$, $\breve{{{\rm{\Upsilon }}}_{4}}$ is also the solution of the prolonged system including (6), (9), (11), (14) where
Using the finite symmetry transformation given above, one can obtain a new solution from any seed solution of equation (6) and equation (9).
$f={{\rm{e}}}^{{kx}+{ly}+{mt}}$ is a solution of equation (9) with $\alpha =\tfrac{+3{k}^{6}+{l}^{4}{\sigma }^{2}+2k\,{l}^{2}m\sigma +{k}^{2}{m}^{2}}{6{k}^{4}}$ then
is a solution of equation (6) via equation (14) with $\alpha =-\tfrac{-12{k}^{6}-{l}^{4}{\sigma }^{2}-2k\,{l}^{2}m\sigma -{k}^{2}{m}^{2}}{6{k}^{4}}$. By using (20) we obtain a new solution of equation (6) as
where ${S}_{1}=\sinh \left({kx}+{ly}+{mt}\right)$, ${S}_{2}={\rm{\cosh }}({kx}+{ly}+{mt})$ and ${\rm{\Psi }}=\tfrac{12{k}^{6}+{l}^{4}{\sigma }^{2}+2k\,{l}^{2}m\sigma +{k}^{2}{m}^{2}}{{k}^{4}}$ (ε is arbitrary constants).
3. CRE solvability
According to the CRE method [17, 32] the solution of equation (6) is written as
Riccati equation with s0, s1 and s2 are arbitrary constants. Plugging equations (23) with (24) into (6) and collecting all the coefficients of the powers of R(w) results in a system of PDEs around u0, and u1. Solving this overdetermined system we get
Hence, equation (6) obviously has the truncated Painlevé expansion solution connected to the Riccati equation equation (24). As a result, we can deduce that the equation (6) is CRE solvable [17, 32]. We shall now provide the critical Bäcklund transformation theorem.
If function w is a solution of equation (26), then
is a Bäcklund transformation between w and u which is the solution of equation (6) where R(w) is the solution of the equation (24).
4. Solitary wave and interaction wave solutions of (2+1)-dimensional Chaffee–Infante equation
This section is split into two subsections. Within the structure of w linear function selection, the exact solution profile of the Riccati problem in the form of tanh and the solitary wave profile will be constructed in the first subsection. The w function combines the linear function and the Jacobi elliptic function in the second subsection, representing the soliton-cnoidal solution interaction.
with $\alpha =\tfrac{-12{s}_{0}{s}_{2}\,{k}^{6}+3{s}_{1}^{2}{k}^{6}+{l}^{4}{\sigma }^{2}+2k\,{l}^{2}\rho \sigma +{k}^{2}{\rho }^{2}}{6{k}^{4}}$ (k, l, ρ arbitrary constants). Putting equations (28) and (29) into CRE solution i.e. equation (27) yields the single soliton solution represented below:
The explicit interaction solutions between the soliton and the cnoidal periodic wave may be given in Jacobi elliptic functions using general solution forms of the equation (32). In this section, we will present two specific solutions to equation (32) in order to solve the (CI) equation.
is a simple solution of equation (32). Subtituing equations (34) with (33) and ${{\rm{cn}}}^{2}=1-{{\rm{sn}}}^{2}$, ${\rm{d}}{n}^{2}=1-{n}^{2}{{\rm{sn}}}^{2}$ where ${\rm{sn}}(m\xi ,n)=\sin $ am(mξ, n), ${\rm{cn}}(m\xi ,n)=\cos $ am(mξ, n), ${\rm{d}}n(m\xi ,n)=\frac{{\rm{d}}}{{\rm{d}}\xi {am}(m\xi ,n)}$ and am is Jacobi amplitude, into equation (32) and eliminating all coefficients of powers of ${\rm{sn}}(m\xi ,n)$, we accomplish
where $S={\rm{sn}}(m\xi ,n)$, $C={\rm{cn}}(m\xi ,n)$, $D={\rm{d}}n(m\xi ,n)$, and $\psi ={\int }_{{\xi }_{0}}^{\xi }{\left({\delta }_{0}+{\delta }_{1}{sn}{\left({mY},n\right)}^{2}\right)}^{-1}){\rm{d}}Y.$
Physical discussion
In this part, the exact solution profiles obtained in this section against the (2+1) dimensional (CI) model have a very important place in the explanations of various kinds of physical phenomena in high-energy physics and electronic science fields. We have presented graphical simulations of exact solution forms in different physical structures with the application of the residual symmetry method and CRE approaches. We examined the dynamic behavior of exact solution profiles with an appropriate selection of parameters in exact solution forms.
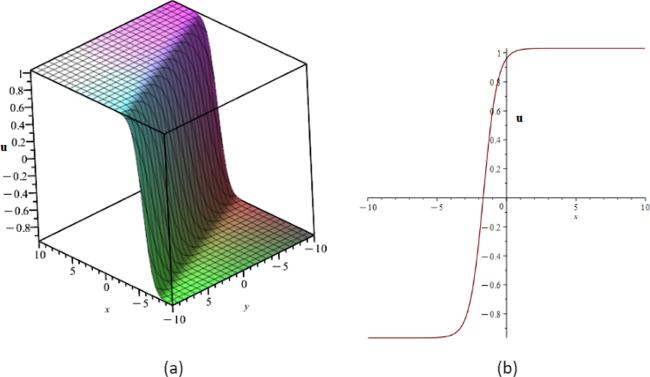
Figure 1 illustrated 3D and 2D graphical representations of the u1(x, y, t) given in equation (21), as constructed with ε = 0.1, k = −2, l = −1, m = 6, σ = 2, t = 0, y = 1. We discovered that u1 is a kink-type profile as a result of this investigating. We know that kink waves are rising or descending waves that go from one asymptotic state to another. The kink solution approaches an infinite constant [41].
Figure 1. (a) 3D-plot of u1 given in equation (21) where ε = 0.1, k = −2, l = −1, m = 6, σ = 2, t = 0, (b) 2D-plot of u1 given in equation (21) where ε = 0.1, k = −2, l = −1, m = 6, σ = 2, t = 0, y = 1.
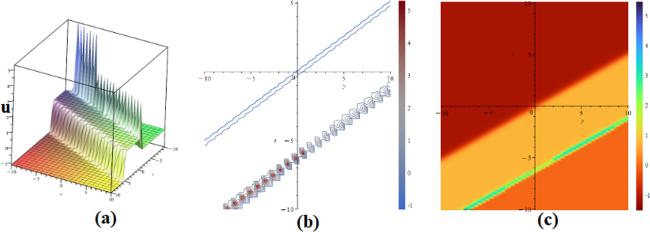
In figure 2, we presented the 3D, contour and density representations of the u2(x, y, t) interaction given in equation (36), respectively.
Figure 2. (a) 3D-plot of u4 given in equation (36), (b) Contour-plot of u4 given in equation (36), (c) Density plot of u4 given in equation (36) where s0 = 1, s1 = 3, s2 = 1, p2 = 0.3, q2 = −0.7, η1 = 1, η0 = 0.6, α = 1, σ = −0.7, x = 1.
In figure 3, the solution u5(x, y, t) given in equation (36), revealed by the interaction of a rational elliptical form solution of the equation (32) and a linear function, is presented together with s0 = 1, s1 = 3, s2 = 2, r2 = 2, q2 = −2, r1 = 1, q1 = −1, r1 = 1, r2 = 4.5, δ1 = 1, η0 = 2, α = 1, σ = 0.5, η0 = −9, and, ξ0 = 0. In figure 3 (a), 3D representation of u5(1, y, t), in (b) we demonstrate 2D plot of (u5) (1, 1, t) , (c) 3D plot of u5(x, y, t) at t = 1.
Figure 3. (a) 3D-plot of u5(1, y, t) given in equation (39), (b) 2D-plot of u5(1, 1, t) given equation (39), (c) 3D-plot of u5(x, y, 1) given in equation (39) where s0 = 1, s1 = 3, s2 = 2, r2 = 2, q2 = −2, r1 = 1, q1 = −1, r1 = 1, r2 = 4.5, δ1 = 1, η0 = 2, α = 1, σ = 0.5, η0 = −9, ξ0 = 0.
5. Conclusion
In this paper, we discussed the (2+1)-dimensional CI model, which is a well-known reaction diffusion equation. First, we applied truncated Painlevé expansion to generate the residual and Bäcklund transformations of the equation. Next, we demonstrated that the Chaffee–Infante equation is CRE solvable. To produce soliton-cnoidal wave solutions, two forms of special elliptic equation solutions are employed. Many important physical phenomena may be explored using soliton-cnoidal wave interaction solutions, including tsunami, and fermionic quantum plasma. Because the investigated equation is (2+1)-dimensional, applying the approaches is very complicated. We feel that these solutions are very distinct from those found in the literature. To the best of our knowledge, the retrieved exact solution profiles and non-local symmetry transformations are new. In addition, we have checked all the constructed exact solutions that satisfy the Chaffe-Infante equation via the Maple package program.
ZhouT YTianBShenYGaoX T2023 Auto-Bäcklund transformations and soliton solutions on the nonzero background for a (3+1)-dimensional Korteweg-de Vries-Calogero-Bogoyavlenskii-Schif equation in a fluid Nonlinear Dyn.111 8647 8658
WazwazA MAlhejailiWAL-GhamdiA OEl-TantawyS A2023 Bright and dark modulated optical solitons for a (2+1)-dimensional optical Schrödinger system with third-order dispersion and nonlinearity Optik274 170582
TariqK UWazwazA MJavedR2023 Construction of different wave structures, stability analysis and modulation instability of the coupled nonlinear Drinfel'd–Sokolov–Wilson model Chaos Solit. Fractals166 112903
WazwazA MKaurL2019 Complex simplified Hirota's forms and Lie symmetry analysis for multiple real and complex soliton solutions of the modified KdV–Sine-Gordon equation Nonlinear Dyn.95 2209 2215
WazwazA MEl-TantawyS A2017 Solving the (3+1)-dimensional KP–Boussinesq and BKP–Boussinesq equations by the simplified Hirota's method Nonlinear Dyn.88 3017 3021
OlverP J1993Applications of Lie Groups to Differential Equationsvol 107 Springer Science & Business Media
19
BlumanGAncoS2008Symmetry and Integration Methods for Differential Equationsvol 154 Springer Science & Business Media
20
BlumanG WCheviakovA FAncoS C2010Applications of Symmetry Methods to Partial Differential Equationsvol 168 Springer
21
IbragimovN H2009A Practical Course in Differential Equations and Mathematical Modelling World Scientific Publishing Co Pvt Ltd
22
ChaoluTBlumanG2014 An algorithmic method for showing existence of nontrivial non-classical symmetries of partial differential equations without solving determining equations J. Math. Anal. Appl.411 281 296
MeleshkoS VGrigorievY NIbragimovN KKovalevV F2010Symmetries of Integro-Differential Equations: With Applications in Mechanics and Plasma Physicsvol 806 Springer Science & Business Media
24
BlumanG WCheviakovA FIvanovaN M2006 Framework for nonlocally related partial differential equation systems and nonlocal symmetries: extension, simplification, and examples J. Math. Phys.47 113505
ChenJ CXinX PChenY2014 Nonlocal symmetries of the Hirota-Satsuma coupled Korteweg–de Vries system and their applications: exact interaction solutions and integrable hierarchy J. Math. Phys.55 053508
WazwazA M2018 Painlevé analysis for a new integrable equation combining the modified Calogero–Bogoyavlenskii–Schiff (MCBS) equation with its negative-order form Nonlinear Dyn.91 877 883
WazwazA M2020 Painlevé analysis for Boiti–Leon–Manna–Pempinelli equation of higher dimensions with time-dependent coefficients: multiple soliton solutions Phys. Lett. A384 126310
YusufASulaimanT AAbdeljabbarAAlquranM2023 Breather waves, analytical solutions and conservation laws using Lie–Bäcklund symmetries to the (2+1)-dimensional Chaffee–Infante equation J. Ocean Eng. Sci.8 145 151
RiazM BAtanganaAJhangeerAJunaid-U-RehmanM2021 Some exact explicit solutions and conservation laws of Chaffee–Infante equation by Lie symmetry analysis Phys. Scr.96 084008
AkbarM AAliN H MHussainJ2019 Optical soliton solutions to the (2+1)-dimensional Chaffee–Infante equation and the dimensionless form of the Zakharov equation Adv. Differ. Equ.2019 1 18
SulaimanT AYusufAAlquranM2021 Dynamics of lump solutions to the variable coefficients (2+1)-dimensional Burger's and Chaffee–Infante equations J. Geom. Phys.168 104315
KumarSAlmusawaHHamidIAkbarM AAbdouM A2021 Abundant analytical soliton solutions and evolutionary behaviors of various wave profiles to the Chaffee–Infante equation with gas diffusion in a homogeneous medium Results Phys.30 104866





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}