



1. Introduction
2. The dark soliton solutions for the coupled Hirota equation
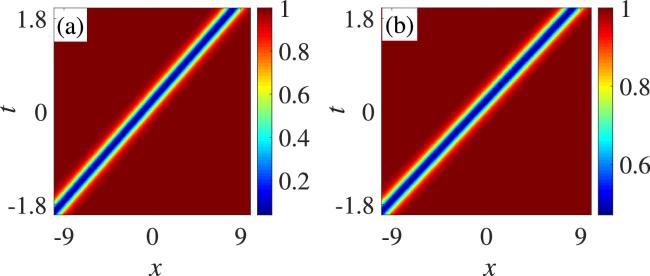
Figure 1. The density profiles of intensity square of the dark soliton solution with the parameters ${{\boldsymbol{c}}}_{1}^{(s)}\approx \left(-0.5,1,-0.2513+1.2203{\rm{i}}\right)$, a1 = 1, a2 = −0.4, c1 = 1, c2 = 1, and α = 0.65, which corresponds to an SVDS. (a) The density profile of $| {q}_{1}^{[1]}{| }^{2}$. (b) The density profile of $| {q}_{2}^{[1]}{| }^{2}$. |
The expressions for the multi-dark soliton solutions can be derived by the n-fold uniform Darboux transformation (

Figure 2. The density profiles of intensity square of the dark soliton solution with the parameters ns = 3, nd = 0, a1 = 0.5, a2 = −0.4, c1 = 1, c2 = 1, α = 0.625, and c ≈ (1, 0.5, −1, 1, 1.2, 10, 0.0686 + 0.9824i, 0.0302 + 1.2606i, − 0.1154 + 1.0236i), which corresponds to a general multi-dark soliton solution. (a) The density profile of $| {q}_{1}^{[3]}{| }^{2}$. (b) The density profile of $| {q}_{2}^{[3]}{| }^{2}$. |
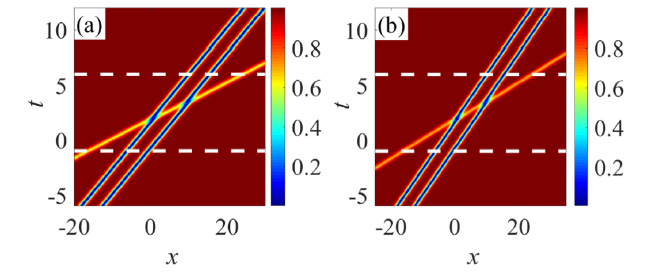
Figure 3. The density profiles of the intensity square of the dark soliton solution with the parameters ns = 1, nd = 1, a1 = − 0.2, a2 = − 0.4, c1 = 1, c2 = 1, α = 0.625, and ${\boldsymbol{c}}\approx \left(0.15,0.1,-1,1,1.2,10,0.15-1.4107{\rm{i}},0.1498+1.498{\rm{i}},0.1443+0.8251{\rm{i}}\right)$, which corresponds to a multi-dark soliton consisting of a symmetric DVDS and an SVDS. (a) The density profile of $| {q}_{1}^{[3]}{| }^{2}$. (b) The density profile of $| {q}_{2}^{[3]}{| }^{2}$. |
If the following conditions $(1)$ or $(2)$ hold:
| 1. | (1)$\lambda \in \left(\tfrac{{{\rm{\Delta }}}_{3}-\sqrt{{{\rm{\Delta }}}_{1}+\sqrt{{{\rm{\Delta }}}_{2}}}}{4\left({a}_{1}-{a}_{2}\right)},\tfrac{{{\rm{\Delta }}}_{3}-\sqrt{{{\rm{\Delta }}}_{1}-\sqrt{{{\rm{\Delta }}}_{2}}}}{4\left({a}_{1}-{a}_{2}\right)}\right)$∪$\left(\tfrac{{{\rm{\Delta }}}_{3}+\sqrt{{{\rm{\Delta }}}_{1}-\sqrt{{{\rm{\Delta }}}_{2}}}}{4\left({a}_{1}-{a}_{2}\right)},\tfrac{{{\rm{\Delta }}}_{3}+\sqrt{{{\rm{\Delta }}}_{1}+\sqrt{{{\rm{\Delta }}}_{2}}}}{4\left({a}_{1}-{a}_{2}\right)}\right)$ with ${\left({a}_{1}-{a}_{2}\right)}^{2}\geqslant 8{c}_{1}^{2}$, |
| 2. | (2)$\lambda \in \left(\tfrac{{{\rm{\Delta }}}_{3}-\sqrt{{{\rm{\Delta }}}_{1}-\sqrt{{{\rm{\Delta }}}_{2}}}}{4\left({a}_{1}-{a}_{2}\right)},\tfrac{{{\rm{\Delta }}}_{3}+\sqrt{{{\rm{\Delta }}}_{1}-\sqrt{{{\rm{\Delta }}}_{2}}}}{4\left({a}_{1}-{a}_{2}\right)}\right)$ with ${\left({a}_{1}-{a}_{2}\right)}^{2}\lt 8{c}_{1}^{2}$, |
In order to construct dark soliton solutions by uniform Darboux transformation, equation (

Figure 4. The existence and velocity variation of the dark soliton solutions. The parameters are a2 = −0.4, c1 = c2 = 1, α = 0.625. The white square corresponds to the dark soliton solution in figure 1, the green triangle to the dark soliton solution in figure 2, and the pink pentagram to the special dark soliton solution in figure 3. The parameter selections of the solutions depicted in this figure are consistent with the requirement for the existence of solutions as stipulated in lemma |
3. The asymptotic analysis of the dark soliton solutions
For the multi-dark soliton solutions ${q}_{i}^{[n]}(x,t;{\boldsymbol{c}})$, $n={n}_{s}+2{n}_{d}$, i = 1, 2, composed of ns SVDSs and nd DVDSs, we define trajectories for SVDSs and DVDSs, respectively.
| 1. | (1)In the case of SVDSs, suppose ${v}_{1}^{(s)}\gt {v}_{2}^{(s)}\gt \cdots \gt {v}_{{n}_{s}}^{(s)}$, then we define the trajectories lj as $x-{v}_{j}^{(s)}t\,\equiv \mathrm{const}$, $j=1,2,\cdots ,{n}_{s}$. |
| 2. | (2)In the case of DVDSs, suppose ${v}_{1}^{(d)}\gt {v}_{2}^{(d)}\gt \cdots \gt {v}_{{n}_{d}}^{(d)}$, then we define the trajectories Lj as $x-{v}_{j}^{(d)}t\,\equiv \mathrm{const}$, $j=1,2,\cdots ,{n}_{d}$. |
Set the matrices
Matrix ${\boldsymbol{A}}$ is a Cauchy matrix and matrix ${\boldsymbol{B}}$ is a diagonal matrix, thus we can directly identify the determinants of them. Additionally, matrix ${\boldsymbol{C}}$ can be rewritten as ${\boldsymbol{C}}={\left(\tfrac{{a}_{i}+{\chi }_{k}^{* }}{{a}_{i}+{\chi }_{l}}\tfrac{2}{{\chi }_{l}-{\chi }_{k}^{* }}\right)}_{1\leqslant k,l\leqslant n}$, enabling us to obtain the determinant of matrix ${\boldsymbol{C}}$.
As $t\to \pm \infty $ , the multi-dark soliton solutions ${q}_{i}^{[n]}(x,t;{\boldsymbol{c}})$ in equation (
| i | (i)As ${v}_{j-1}\ne {v}_{j}$ and ${v}_{j}\ne {v}_{j+1}$, ${q}_{i}^{\pm }(x,t;{{\boldsymbol{c}}}_{j}^{(s)})$ is the SVDS ${q}_{i}^{[1]}(x,t;{{\boldsymbol{c}}}_{j}^{(s)})$ with a shift ${x}_{0j}^{\pm }$, and its expression is $\begin{eqnarray}{q}_{i}^{\pm }(x,t;{{\boldsymbol{c}}}_{j}^{(s)})={c}_{i}\left(1-{B}_{j}+{B}_{j}\tanh ({Y}_{j}^{\pm })\right){{\rm{e}}}^{{\rm{i}}{\theta }_{i}},\end{eqnarray}$ where ${Y}_{j}^{\pm }=x-{v}_{j}t+{\gamma }_{j}+{x}_{0j}^{\pm }$, ${x}_{0j}^{\pm }=-\tfrac{1}{2}\mathrm{ln}(\tfrac{{\left({\zeta }_{j}^{[j]}\right)}^{\pm }}{{\left({\tilde{\zeta }}_{j}^{[j]}\right)}^{\pm }})$, ${\gamma }_{j}$ and Bj are defined in equations ( |
| ii | (ii)As ${v}_{j-1}={v}_{j}$, ${q}_{i}^{\pm }(x,t;{{\boldsymbol{c}}}_{j}^{(d)})$ represents a DVDS and its expression is $\begin{eqnarray}{q}_{i}^{\pm }(x,t;{{\boldsymbol{c}}}_{j}^{(d)})={c}_{i}\displaystyle \frac{\det ({\hat{{\boldsymbol{M}}}}_{i}^{\pm })}{\det ({\hat{{\boldsymbol{N}}}}^{\pm })}{{\rm{e}}}^{{\rm{i}}{\theta }_{i}},\end{eqnarray}$ where $\begin{eqnarray}\begin{array}{rcl}{\hat{{\boldsymbol{M}}}}_{i}^{\pm } & = & {\left(\displaystyle \frac{[{{\rm{e}}}^{{\rm{i}}({\hat{X}}_{l}^{\pm }-{\left({\widetilde{X}}_{k}^{\pm }\right)}^{* })}+{\delta }_{k,l}]}{{\chi }_{l}-{\chi }_{k}^{* }}-{\beta }_{l,i}{{\rm{e}}}^{{\rm{i}}({\hat{X}}_{l}^{\pm }-{\left({\widetilde{X}}_{k}^{\pm }\right)}^{* })}\right)}_{j-1\leqslant k,l\leqslant j},\\ {\hat{{\boldsymbol{N}}}}^{\pm } & = & {\left(\displaystyle \frac{[{{\rm{e}}}^{{\rm{i}}({\hat{X}}_{l}^{\pm }-{\left({\widetilde{X}}_{k}^{\pm }\right)}^{* })}+{\delta }_{k,l}]}{{\chi }_{l}-{\chi }_{k}^{* }}\right)}_{j-1\leqslant k,l\leqslant j},\end{array}\end{eqnarray}$ ${\hat{X}}_{l}^{\pm }={X}_{l}+\mathrm{ln}({\left({\zeta }_{j}^{[l]}\right)}^{\pm })$, ${\widetilde{X}}_{l}^{\pm }={X}_{l}+\mathrm{ln}({\left({\tilde{\zeta }}_{j}^{[l]}\right)}^{\pm })$, ${\hat{{\boldsymbol{M}}}}_{i}^{\pm }$ and ${\hat{{\boldsymbol{N}}}}^{\pm }$ are both 2 × 2 matrices; ${\beta }_{l,i}$ and ${\delta }_{k,l}$ are defined in equation ( |
The proof of theorem
Then we conduct the asymptotic analysis of the multi-dark soliton solutions along the trajectory Lj. The multi-dark soliton solutions can be further expressed as
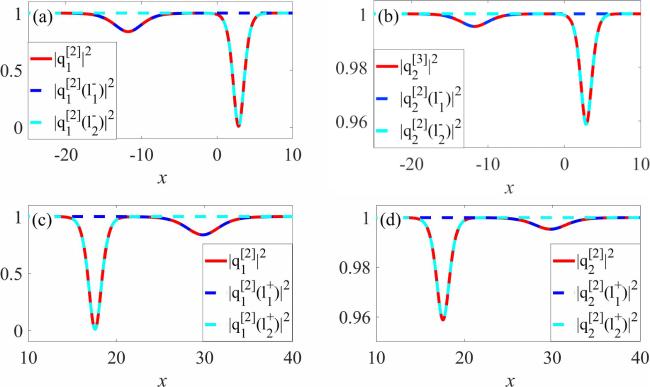
Figure 5. The collision dynamics of two SVDSs. Left panels: dynamical evolution of dark soliton solution $| {q}_{1}^{[2]}{| }^{2}$ before (t = −2, (a)) and after (t = 10, (c)) the collision. Right panels: dynamical evolution of dark soliton solution $| {q}_{2}^{[2]}{| }^{2}$ before (t = −2, (b)) and after (t = 10, (d)) the collision. The solid red line describes the evolution of the dark soliton solution ( |
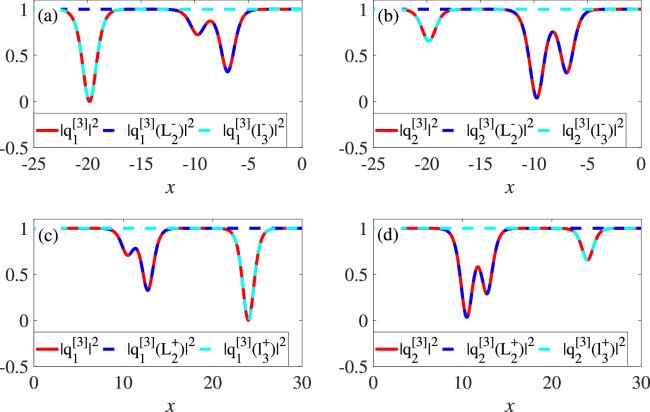
Figure 6. The collision dynamics of an SVDS and a DVDS. Left panels: dynamical evolution of dark soliton solution $| {q}_{1}^{[3]}{| }^{2}$ before (t = − 3, (a)) and after (t = 5, (c)) the collision. Right panels: dynamical evolution of dark soliton solution $| {q}_{2}^{[3]}{| }^{2}$ before (t = −3, (b)) and after (t = 5, (d)) the collision. The solid red line describes the evolution of the dark soliton solution ( |
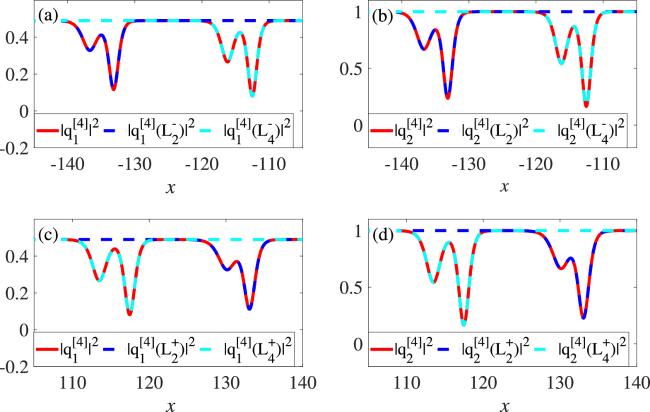
Figure 7. The collision dynamics of two DVDSs. Left panels: dynamical evolution of multi-dark soliton solution $| {q}_{1}^{[4]}{| }^{2}$ before (t = −50, (a)) and after (t = 50, (c)) the collision. Right panels: dynamical evolution of dark soliton solution $| {q}_{2}^{[4]}{| }^{2}$ before (t = −50, (b)) and after (t = 50, (d)) the collision. The solid red line describes the evolution of the dark soliton solution ( |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 8. The collision dynamics of an SVDS and a DVDS. Left panels: Dynamical evolution of a multi-dark soliton solution $| {q}_{1}^{[3]}{| }^{2}$ before (t = −1, (a)) and after (t = 6, (c)) the collision. Right panels: dynamical evolution of a multi-dark soliton solution $| {q}_{2}^{[3]}{| }^{2}$ before (t = −1, (b)) and after (t = 6, (d)) the collision. The solid red line describes the evolution of the dark soliton solution ( |