The rotating shallow water system is an important physical model, which has been widely used in many scientific areas, such as fluids, hydrodynamics, geophysics, oceanic and atmospheric dynamics. In this paper, we extend the application of the Adomian decomposition method from the single equation to the coupled system to investigate the numerical solutions of the rotating shallow water system with an underlying circular paraboloidal basin. By introducing some special initial values, we obtain interesting approximate pulsrodon solutions corresponding to pulsating elliptic warm-core rings, which take the form of realistic series solutions. Numerical results reveal that the numerical pulsrodon solutions can quickly converge to the exact solutions derived by Rogers and An, which fully shows the efficiency and accuracy of the proposed method. Note that the method proposed can be effectively used to construct numerical solutions of many nonlinear mathematical physics equations. The results obtained provide some potential theoretical guidance for experts to study the related phenomena in geography, oceanic and atmospheric science.
Hongli An, Liying Hou, Manwai Yuen. The extended Adomian decomposition method and its application to the rotating shallow water system for the numerical pulsrodon solutions[J]. Communications in Theoretical Physics, 2024, 76(12): 125004. DOI: 10.1088/1572-9494/ad674f
1. Introduction
Solutions of nonlinear partial differential equations (PDEs) are important for experts to study physical phenomena. It is not only because they can help experts understand the physical phenomena described in nature, but also because they can serve as benchmarks for testing and improving numerical codes. To obtain solutions of nonlinear PDEs, many powerful methods have been proposed, such as the inverse scattering theory [1], Darboux and Bäcklund transformation [2–4], Adomian decomposition method (ADM) [5–9], Lie-group method [10], Hirota bilinear method [11, 12], variable separation approach [13, 14], Riemann–Hilbert method [15–20] etc [21–27]. Among these methods, the ADM is one of the most popular algorithms commonly used to construct numerical solutions and even closed-form analytical solutions. Compared to the traditional methods mentioned above, the most obvious advantage of the ADM is that it usually provides more realistic series solutions while no special assumptions or perturbation techniques are required.
In the present study, we extend the application of the ADM from the single equation to the coupled system to investigate the numerical solutions of the (2+1)-dimensional rotating shallow water (RSW) system with an underlying circular paraboloidal basin, which is described by,
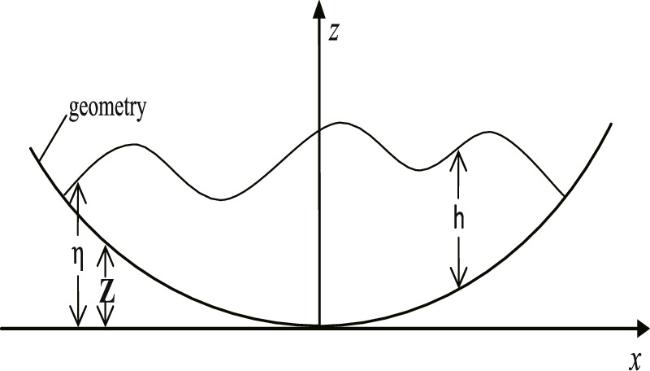
is the circular paraboloidal rigid basin, q = (u, v) is a vector of the fluid velocity, f is the Coriolis parameter and h represents the upper-layer height function scaled by a fixed height H. The free surface of the liquid is determined by,
Figure 1. Cross-section of the fluid basin z = Z(x, y). h denotes the height from the free surface to the basin and η(x, y, t) = Z + h.
It is known that the RSW system is an important physical model, which has been widely used in many scientific fields, such as fluids, hydrodynamics, geophysics, oceanic and atmospheric dynamics [28–32]. Due to its significance and wide applications, many scholars have paid much attention to the RSW system and numerous interesting results have been achieved. For instance, Ball obtained key results on the time evolution of moments of inertia and invariance properties of the RSW system [33, 34]. Levi and his co-authors found that by subjecting the RSW system with a circular cylindrical bottom topography to a comprehensive Lie-group analysis, some group-invariant solutions were isolated [35]. Rogers derived the complete solutions of the RSW model via an elliptical-vortex ansatz [36]. In particular, a novel subclass of so-called pulsrodon solutions was presented, which combined the pulsating characteristic of the circular pulson with the more general elliptic geometry of the rodon. Interestingly, when Holm reconsidered the RSW system in Lagrangian coordinates, he also obtained the pulsrodon solution but by using the method of Hamiltonian mechanics. Meanwhile, he found that these pulsrodons were orbitally Lyapunov stable to perturbations within the class of elliptical-vortex solutions [37]. Recently, Rogers and An have shown that the RSW system with an underlying circular paraboloidal basin admits an integrable Ermakov–Ray–Reid structure of Hamiltonian type. With the aid of the Ermakov invariant, the pulsrodons are also remarkably obtained [38]. The pulsrodons are very useful in the study of tidal oscillations, warm-core rings, oceanic and atmospheric dynamics [36, 39–44]. Furthermore, the existence of the pulsrodons proves to be an important factor affecting typhoon intensity [44]. It needs to be pointed out is that the pulsrodons derived in [38] are analytical. However, to the best of our knowledge, there has been no work done on the numerical pulsrodons of the RSW equations until now. In addition, to date, there has been no related work that has been carried using the ADM. Based on the above analysis as well as the importance and wide applications of the pulsrodons and RSW system, it seems worthwhile to investigate whether numerical pulsrodons can be constructed in the RSW system via the ADM. If so, it would be of interest to apply these solutions to explain or predict some physical phenomena. In particular, it may provide some new perspectives to investigate other related phenomena in the ocean and atmosphere.
In summary, the main purpose of this paper is to extend the application of the ADM from the single equation to the coupled system to seek the numerical pulsrodons for the (2+1)-dimensional RSW system. This paper is arranged as follows. In section 2, some basic descriptions of the extended ADM for the coupled system are given. In section 3, some special initial conditions are introduced and the numerical pulsrodon solutions are constructed using the proposed method. Numerical figures show that these solutions are rotational and their behavior coincides with the motion of the ‘breather-type' oscillations of upper free surfaces in the ocean. In addition, error analysis reveals that our solutions have perfect convergence. The paper ends with a brief conclusion.
2. Description of the extended ADM
In this section, we extend the Adomain decomposition from the single equation to the coupled system. It is described as follows. Consider the nonlinear coupled differential equations in an operator form:
where L is the highest-order derivative operator and its inverse can be easily solved, Ri (i = 1, 2, 3) stand for the linear differential operators with respect to u, v and h and its order is less than L, while Ni denote the nonlinear terms and gi are the source terms of the given coupled system.
After applying the inverse operator L−1 on both sub-equations of equation (4), we obtain:
where fi(x, y, t) are the functions arising from the given initial conditions. It is necessary to point out that if L is a k-order differential operator, then L−1 will be a k-fold integral with ${{\rm{L}}}^{-1}{\rm{L}}u=u(x,y,t)-u(x,y,0)-\displaystyle \sum _{j=1}^{k-1}\displaystyle \frac{1}{j!}{t}^{j}{u}_{{jt}}(x,y,0)$. Accordingly, the function f1 given in (5) is described by,
It is noted that the Adomain polynomials Pin only depend on uk, vk and hk (k = 0, ⋯ ,n) and the summation of the subscripts in each term is equal to n. Meanwhile, these polynomials can be easily computed with the aid of Maple.
Substituting the decomposition series equations (7) and (8) into (5), we obtain the following iteration recursive formulas:
It can be seen that all the components un, vn and hn can be calculated from the iteration recursive relation equation (10). Usually, the decomposition series solutions $u(x,y,t)\,={\sum }_{n\,=\,0}^{\infty }{u}_{n}(x,y,t)$, $v(x,y,t)={\sum }_{n=0}^{\infty }{v}_{n}(x,y,t)$ and $h(x,y,t)\,={\sum }_{n=0}^{\infty }{h}_{n}(x,y,t)$ rapidly converge to the real physical model. For the convergence, interested readers may refer to [5, 6].
Subsequently, we apply the extended Adomain decomposition procedure given in the above to construct the numerical solutions for the (2+1)-dimensional RSW system with an underlying circular paraboloidal basin.
3. Application of the extended ADM for the numerical pulsrodons of the RSW system
To obtain the numerical solutions of the (2+1)-dimensional RSW system, we rewrite the equation with a circular paraboloidal basin (4) in the following form:
where L = ∂/∂t and its inverse is ${{\rm{L}}}^{-1}(\cdot )={\int }_{0}^{t}(\cdot ){\rm{d}}s$. For the construction of numerical pulsrodons, special initial conditions are introduced:
where α, β, v0, ω0, φ0, k and c1 are real constants and $\alpha =\sqrt{{c}_{3}+k},\beta =\sqrt{{c}_{2}+\tfrac{1}{4}{k}^{2}}\ ({c}_{2}\lt 0)$ and $k=\displaystyle \frac{2\beta (\alpha -\beta )}{{\alpha }^{2}}$.
Applying the inverse operator L−1 to both sides of equation (11) and according to equation (5), we obtain:
Substituting the decomposition series equations (13)–(14) into (7) and using the initial conditions equation (12), we obtain the following recursive formulas:
The values of un+1, vn+1 and hn+1 in (16) can be iteratively obtained with the aid of symbolic computation software Maple. For simplicity, here we just give the first few terms of the decomposition series:
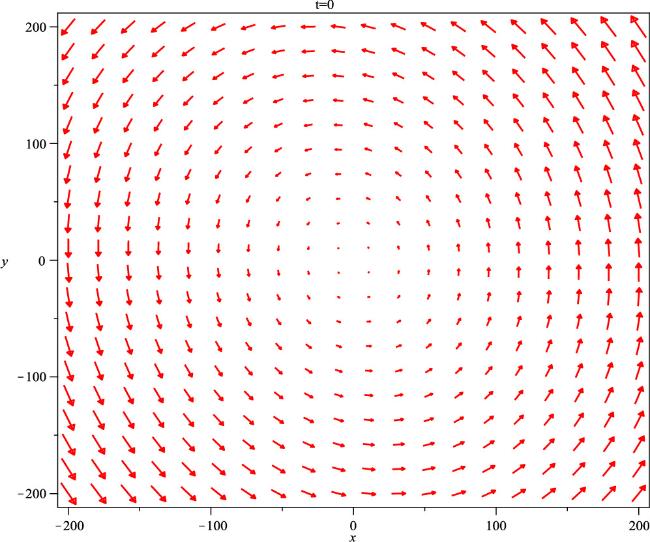
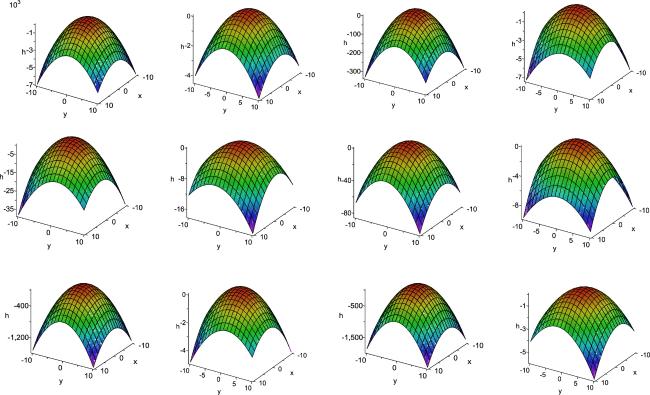
To shed some light on the behavior that the derived numerical pulsrdon solution may exhibit, we perform the numerical simulations in figures 2 and 3 wherein the parameters are chosen as α = 0.2, β = 0.4, v0 = 0.1, ω0 = 0.5, k = − 4 and c1 = 0.4. Figure 2 depicts the vortex structure of the numerical pulsrodons ${\boldsymbol{q}}=({\phi }_{n}^{u},{\phi }_{n}^{v})=(\sum _{i=0}^{n}{u}_{i},\sum _{i=0}^{n}{v}_{i})$ given by (19)1,2 with n = 2. From this figure, it can be seen that the steady fluid is rotational and the velocities of all the fluid particles go directly inwards to the origin. Figure 3 shows the time evolutions of numerical pulsrodons $h={\phi }_{n}^{h}=\sum _{i=0}^{n}{h}_{i}$ given by (19)3 with n = 2. From this figure, we find that the surface of the fluid jumps up and down over a period of time. It is of interest to note that this jumping up and down phenomenon coincides with the motion of the ‘breather-type' oscillations of upper free surfaces in the ocean [33–36].
Figure 2. Structure of the velocity field ${\boldsymbol{q}}=({\phi }_{n}^{u},{\phi }_{n}^{v})$ given by (19)1,2 with n = 2. Length of the arrow represents the strength of the velocity field.
Figure 3. Time evolutions of the height function ${\phi }_{n}^{h}$ given by (19)3 with n = 2 at a regular time interval Δt = 1. Beginning time for the first sub-figure is t = 0 and the ending time for the last sub-figure is t = 11.
As known, the exact solution of the RSW equation derived by Rogers and An via an elliptic vortex procedure [38] takes the following form:
In order to show the efficiency and accuracy of the proposed extended ADM for the numerical solution (19), we conduct some illustrative error analysis between the first n-term approximate solution (19) and the exact solution (20) at various values. Here, we still choose the parameters to be α = 0.2, β = 0.4, v0 = 0.1, ω0 = 0.5, k = − 4 and c1 = 0.4. The differences of the numerical pulsrodons {${\phi }_{n}^{u},{\phi }_{n}^{v},{\phi }_{n}^{h}$} (n = 2) and the exact {u, v, h} are shown in tables 1, 2 and 3.
Table 1. Comparison of the numerical solution ${\phi }_{2}^{u}=\sum _{n=0}^{n=2}{u}_{n}$ given in (19)1 with the exact u(x, y, t) in (20)1 at y = 25.
Table 2. Comparison of the approximate solution ${\phi }_{2}^{v}=\sum _{n=0}^{n=2}{v}_{n}$ described in (19)2 with the exact v(x, y, t) in (20)2 at x = 50.
From tables 1, 2 and 3, one can easily see that although the first three terms in (19) have been chosen, the errors between numerical pulsrodon solutions (19) obtained by the extended ADM and the exact ones are rather small for different parameters, which shows that the numerical pulsrodon solutions can rapidly converge to the exact ones. In addition, numerical calculations reveal that the more terms in (19) are selected, the higher the accuracy is. Therefore, we conclude that the extended ADM is an effective method to construct numerical pulsrodons of the (2+1)-dimensional shallow water system.
4. Conclusion
In this paper, we extend the ADM from the single equation to the coupled system to investigate the numerical solutions of the 2 + 1-dimensional RSW system with a circular paraboloidal bottom basin. Remarkably, by choosing special initial conditions whose velocity components are linear and height function is quadratic, numerical pulsrodon solutions are obtained. Numerical error analysis reveals that although only a few terms in the numerical solutions are selected, the numerical solutions can rapidly converge to the exact solutions given by Rogers and An. Therefore, we conclude that the extended ADM is a very powerful algorithm to solve nonlinear differential equations, especially for the (2+1)-dimensional RSW system. However, there are still many interesting and challenging problems that need further consideration:
1. The literature shows that pulsrodons are very useful in the study of tidal oscillations, warm-core rings, oceanography, atmospheric dynamics as well as other physical areas. However, how to apply the numerical pulsrodons obtained in this paper to explain or predict some related physical phenomena needs deep investigation.
2. We know that the (2+1)-RSW system can be regarded as a model derived from the (3+1)-dimensional Euler equation via the hydrodynamic approximation. The Euler equation can be considered to be the limiting case of the Navier–Stokes equation for a large Reynolds number. Based on their connections and the importance of the Euler and Navier–Stokes equations, it would be of interest to study whether the extended ADM introduced can be adopted to construct the numerical pulsrodons of these models.
3. With the explosive growth of data and computing resources, deep learning has exhibited strong power in many fields, such as image recognition and speech recognition, especially in the scientific computation of nonlinear differential equations. It is worth considering that, when applying deep learning to the RSW system by constraining the neural networks to minimize the loss function, perhaps some predictive solutions may be obtained.
Declaration of authors
The authors declare that the authorship in the article is arranged in alphabetical order of surnames. All authors contributed equally to the work.
We express our sincere thanks to the referees for their valuable comments and helpful suggestions. This study is supported by the National Natural Science Foundation of China (Grant No. 12371250) and the Jiangsu Provincial Natural Science Foundation (Grant Nos. BK20221508, 12205154 and 11775116). As well as the Dean's Research Fund of the Education University of Hong Kong 2023/23 (FLASS/DRF/IRS-8).
TrogdonT, DeconinckB2013 Numerical computation of the finite-genus solutions of the Korteweg–de Vries equation via Riemann–Hilbert problems Appl. Math. Lett.26 5 9
WangD S, XuL, XuanZ2022 The complete classification of solutions to the Riemann problem of the defocusing complex modified KdV equation J. Nonlinear Sci.32 3 48
YangY L, FanE G2023 Soliton resolution and large time behavior of solutions to the Cauchy problem for the Novikov equation with a nonzero background Adv. Math.426 109088 86pp
LiY, TianS F, YangJ J2022 Riemann–Hilbert problem and interactions of solitons in the n-component nonlinear Schrödinger equations Stud. Appl. Math.148 577 605
WuX, TianS F2023 On long-time asymptotics to the nonlocal short pulse equation with the Schwartz-type initial data: Without solitons Physica D448 133733
ChenY, WangQ2006 A unified rational expansion method to construct a series of explicit exact solutions to nonlinear evolution equations J. Appl. Math. Comput.177 396 409
AnH L, FengD L2019 General M-lump, high-order breather and localized interaction solutions to the (2 + 1)-dimensional Sawada–Kotera equation Nonlinear Dyn.98 1275 1286
LeviD, NucciM C, RogersC, WinternitzP1989 Group theoretical analysis of a rotating shallow liquid in a rigid container J. Phys. A: Math. Gen.22 4743 4767
LouS Y, JiaM, TangX Y, HuangF2007 Vortices, circumfuence, symmetry groups, and Darboux transformations of the (2+1)-dimensional Euler equation Phys. Rev. E75 056318
LiJ Y2010 The effect of the ocean eddy to tropical cyclone intensity The PhD dissertation of Institute of Atmospheric Sciences National Taiwan University, Taiwan




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}