



1. Introduction
For $\epsilon =0$ the above system is the extension of the KdV with its linearized equation for $v=\delta u$ (see [4]). For $\epsilon \ne 0$ this system is a consequence of the pseudo-complexification $u\to U=u+{ev}$ of the KdV equation where e is the pseudo-complex unit ${e}^{2}=\epsilon $. For complex numbers $\epsilon =-1$ but for pseudo-complex numbers $\epsilon =1$. Complex conjugation for both cases is the same ${e}^{* }=-e$. Hence our conclusion is that the ${{ \mathcal M }}_{2}$-extension of the KdV equation is the unification of linearization, complexification, and pseudo-complexification of the KdV equation. Our second conclusion is that this is valid in general.
In 2 × 2 matrix algebra we have two subalgebras effective in our approach. It is possible to study the extension of the scalar integrable equations by using subalgebras of higher dimensional matrix algebras. We shall consider such extensions in later communications.
2. SK and KK systems
3. Nonlocal reductions
By using the reduction formulas (1).a, (1).b, (2).a, and (2).b, and the recursion operators of SK and KK systems, i.e., (
4. Shifted nonlocal reductions
5. Hirota bilinearization and one-soliton solution
Take particular values for the parameters of the solution (
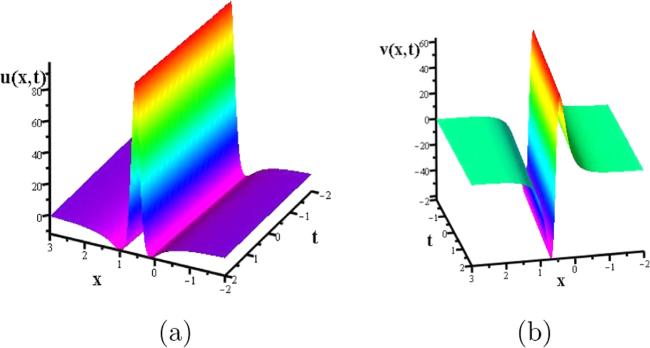
Figure 1. One-soliton solution (u(x, t), v(x, t)) of the SK system ( |
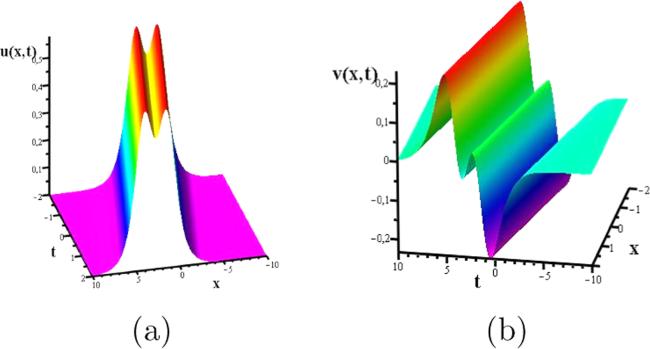
Consider the particular values for the parameters of the solution (
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Figure 2. One-soliton solution (u(x, t), v(x, t)) of the KK system ( |
We note that taking different expansions for the functions f1 and f2 in (