A deep learning method for solving third-order nonlinear evolution equations
|
A deep learning method for solving third-order nonlinear evolution equations |
| Jun Li(李军),Yong Chen(陈勇) |
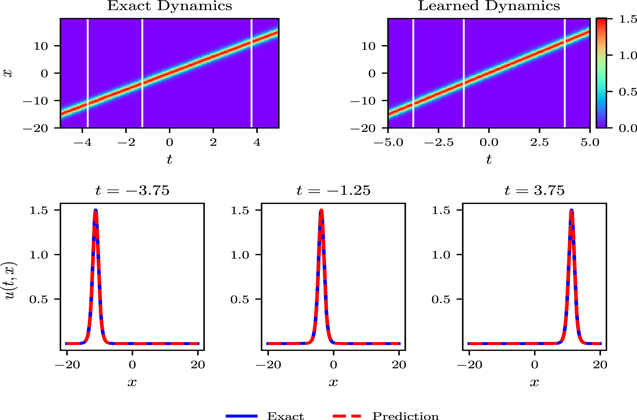
| Figure 1. The KdV equation. Top: a one-soliton solution to the KdV equation (left panel) is compared to the corresponding predicted solution to the learned equation (right panel). The network correctly captures the dynamics behavior and accurately reproduces the soliton solution with a relative |
|
|